If your smart lock must turn a residential deadbolt reliably, plan for a running torque near 1.0–2.0+ kg·cm and design at least 2–3× margin over your measured running torque. In compact housings, an N20 micro gear motor can work when loads are modest and envelopes are tight—especially with metal gears. For higher preload, misaligned doors, or cold-weather friction, a 16 mm planetary gear motor offers safer torque margins, though at the cost of larger diameter and typically higher current.
Key takeaways
- Deadbolt actuation often sits around a practical running range of 1.0–2.0+ kg·cm; size motors with 2–3× safety margin above measured running torque to avoid stalls.
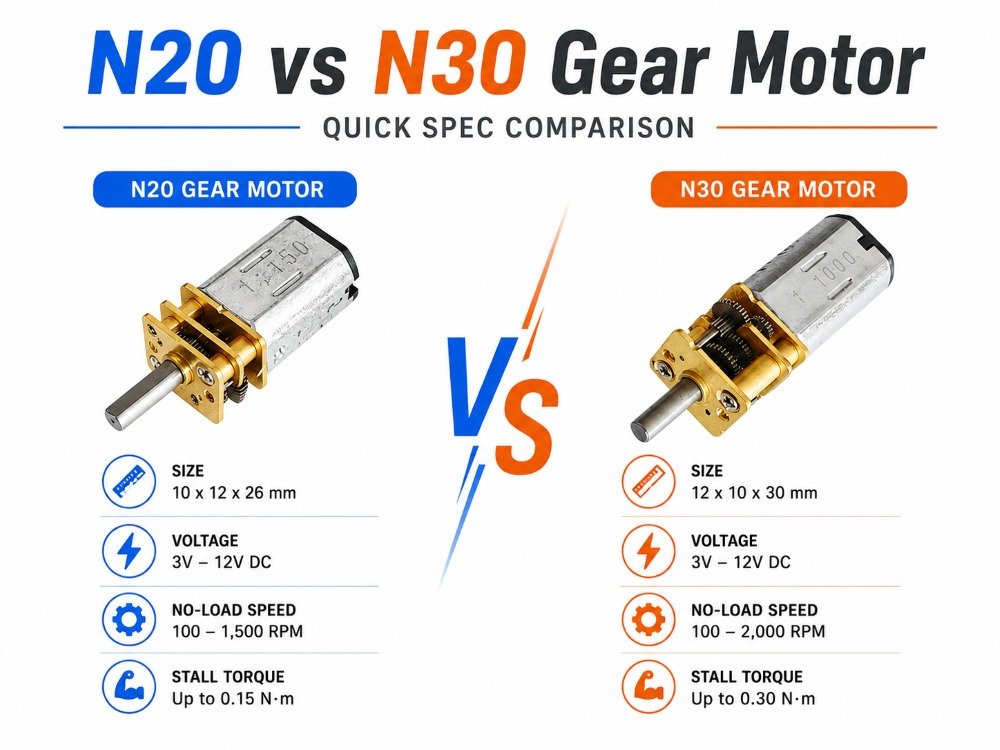
- N20 metal-gear units at 150:1–300:1 commonly show 1.3–2.4 kg·cm stall at 6 V in reputable datasheets; continuous running torque is lower (≈0.3–1.0 kg·cm). Source examples: Pololu micro metal gearmotor pages and consolidated datasheet.
- N20 plastic-gear versions are quieter at light loads but typically have lower allowable torque and wear resistance; use conservatively for deadbolts and validate life by testing.
- 16 mm planetary gear motors frequently provide rated torque in the 3–5 kg·cm band (0.3–0.5 N·m) with all-metal geartrains—better for misalignment, high frequency, or colder climates.
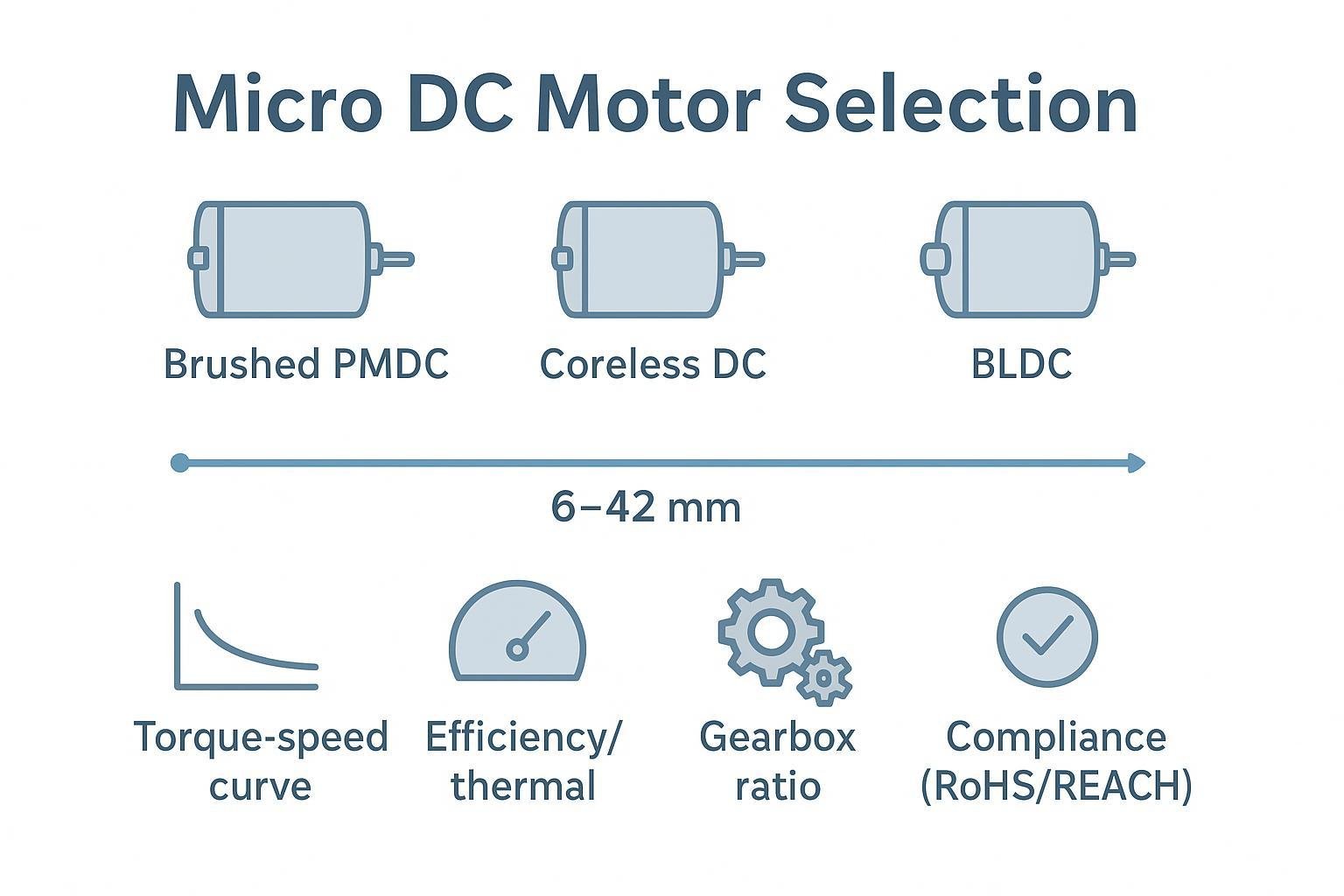
- Compliance matters: verify EU RoHS restricted substances in all homogeneous materials and REACH SVHC disclosures (gears, housings, lubricants, coatings).
- Battery and duty cycle: higher ratios raise torque but slow speed; ensure peak current and thermal limits align with your battery and driver.
Comparison overview: N20 gear motor deadbolt torque options
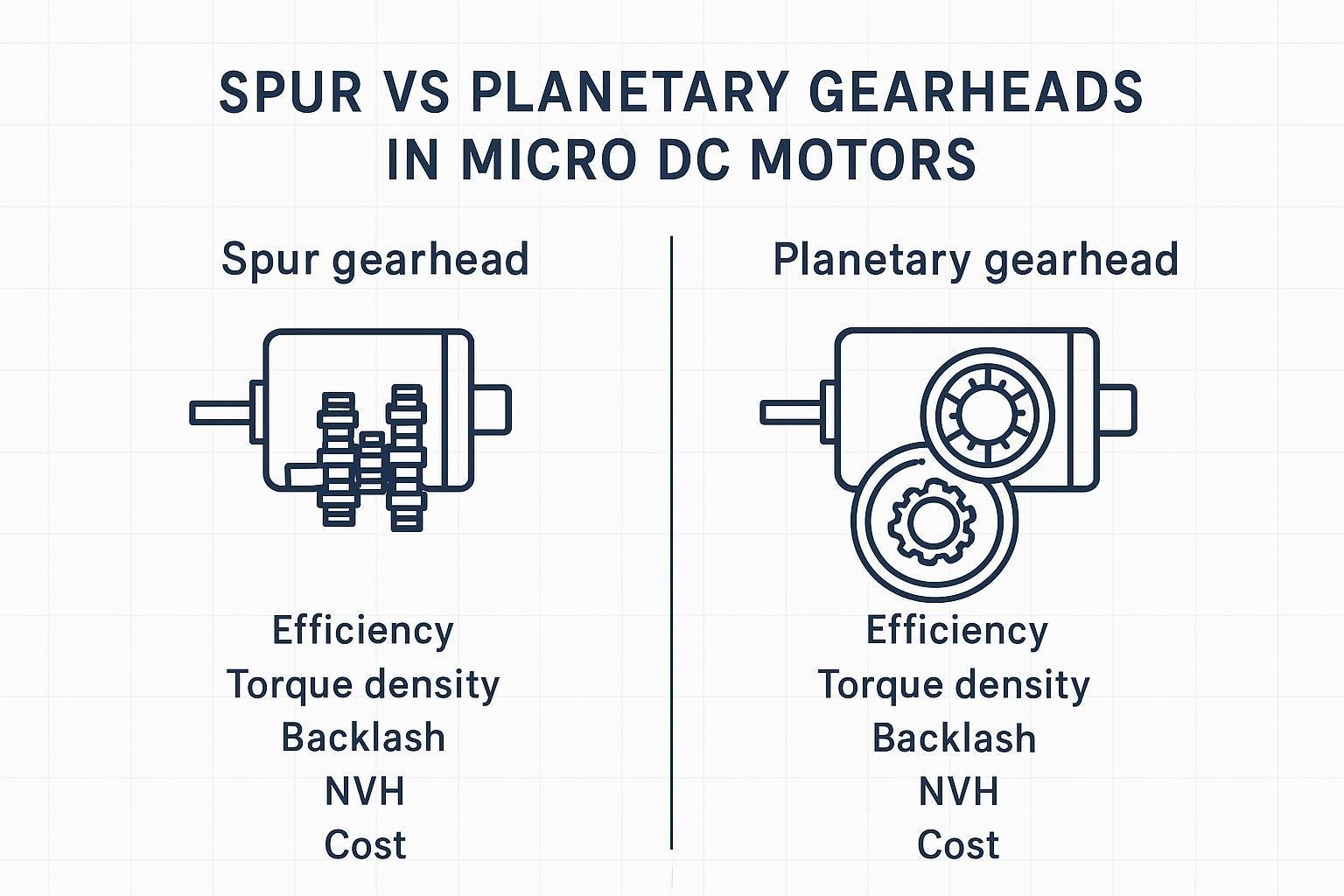
Choosing between N20 spur gearboxes and 16 mm planetary gearboxes hinges on torque headroom, envelope, and long-term durability. The table below summarizes typical, evidence-backed ranges and qualitative notes for deadbolt smart locks. Avoid treating stall numbers as continuous ratings; design for headroom.
| Motor type | Typical running torque band (engineering-conservative) | Example stall/rated torque (datasheet) | Noise | Envelope | Compliance notes | Best for |
|---|---|---|---|---|---|---|
| N20 micro gearmotor (metal gears) | ≈0.3–1.0 kg·cm (varies by variant and thermal limits) | INEED Motors sample table for IND-GM12N20 lists stall and sample on-load entries across ratios; request speed–torque curves and rated/continuous torque from the vendor (IND-GM12N20 product page). | Perceived higher at load vs. plastic; depends on build precision | Gearbox ≈10×12 mm cross-section; very compact | Check lead in copper alloys, coatings, and lubricant SVHCs | Compact retrofits where measured running torque ≤1–1.5 kg·cm and margins remain ≥2–3× |
| N20 micro gearmotor (plastic gears) | Prefer below the metal-gear band; validate by test | Reliable rated/continuous torque tables are sparse at 3–6 V; treat metal values as upper bounds | Often quieter at light loads | Same external footprint as N20 metal | Verify polymer grades (POM/PA), flame ratings, and phthalates | Low-noise, light-duty mechanisms; only use for deadbolts with very low measured torque |
| 16 mm planetary DC gearmotor (all metal) | ≥1.5–3.0 kg·cm continuous feasible with proper selection | Manufacturer examples show 0.3–0.5 N·m rated (3–5 kg·cm) and higher peaks; see INEED’s IND-16GMP1625 product listing for selectable ratios and example tables (IND-16GMP1625 product page). | Generally robust; noise depends on design and mount | Ø16 mm diameter; length varies with ratio and motor | All-metal geartrains; confirm RoHS/REACH per part | High-preload, misaligned doors, colder climates, or frequent actuation |
Two notes on the sources used here: Pololu’s micro metal gearmotor pages and consolidated datasheet provide detailed dimensions and torque relationships, while 16 mm planetary rated torque examples appear on INEED manufacturer listings. Avoid equating stall torque with continuous ratings; design conservatively for durability.
N20 micro gearmotor (metal gears)
INEED’s Open-frame 12mm N20 Micro Gear Motor (IND-GM12N20) lists a wide torque range across gear ratios; sample values on the product page show stall torques of about 0.42 kg·cm (50:1), 1.0 kg·cm (100:1), and 4.1 kg·cm (298:1) at the published operating voltages, with higher-ratio entries up to ~9.0 kg·cm (1000:1). The page also shows on-load torque entries (≈0.075–0.080 kg·cm in the sample table) but does not explicitly label a continuous/rated torque—so treat the stall numbers as limits, not continuous ratings. The part is offered for 2.5–12 V operation and multiple gearbox lengths and ratios; see the INEED product page for details: Open-frame 12mm N20 Micro Gear Motor. As with any small gearmotor, continuous running torque will be lower than stall; sizing to operate at roughly 25%–50% of stall (and asking the supplier for speed–torque curves and duty recommendations) will improve life. Note: the INEED product page does not include an explicit RoHS/REACH declaration or a labeled continuous torque figure, so request material declarations and SVHC screening and a clear rated/continuous torque spec when you RFQ or sample the motor.
Pros: exceptionally compact envelope; better wear resistance under load than plastic gears; broad ratio availability. Constraints: limited continuous torque compared with 16 mm planetaries; higher perceived noise under load; sensitive to stalling—use current limiting and control.
Who it’s for: retrofit designs where measured running torque is firmly ≤1–1.5 kg·cm and space is tight. Aim for 2–3× margin over measured running torque.
N20 micro gearmotor (plastic gears)
Authoritative rated/continuous torque tables for plastic-gear N20s at 3–6 V and 100–300:1 are scarce. In practice, plastic gearboxes (often POM/nylon) prioritize low noise and cost but have lower allowable torque and wear life than metal geartrains. Treat metal-gear stall numbers as upper bounds and design conservatively for deadbolt loads. If you select plastic gears for noise reasons, validate with life testing under your worst-case preload and temperature.
Pros: quieter at light loads; cost-effective; identical external footprint to N20 metal gearboxes. Constraints: reduced torque capacity and durability; increased risk of wear or tooth shear if operated near upper deadbolt loads; limited datasheet certainty.
Who it’s for: low-noise cabinetry or cam locks, and only the lowest-torque deadbolt scenarios after measured validation.
Evidence context: See metal-gear data in Pololu’s pages above as a reference ceiling, and note the evidence gap for plastic N20 rated torque tables.
16 mm planetary DC gearmotor
Planetary gearboxes give better torque density and load distribution than small spur trains, which makes 16 mm planetary units a common step-up when deadbolt running torque or preload risk exceeds what an N20 can safely sustain. INEED Motors publishes multiple 16 mm planetary configurations; the 16mm 12V DC Motor with Planetary Gearbox page shows a 16 mm diameter planetary option with selectable gearbox lengths (≈15–55 mm), many reduction stages (ratios from about 1/4 up to 1/1296 depending on stages), and tabulated example values for no-load, on-load, and stall speed/current/torque at sample ratios—useful real-world reference points when sizing for deadbolts (INEED 16mm planetary product page).
Sample INEED data indicate rated and stall torque scale strongly with ratio and gearbox length; compact, short-body options such as the 12 Volt 030 Gear Reduction Motor give practical examples of high-ratio, short-length choices (sample rows show 96:1, 150:1, 360:1 variants with corresponding no-load/on-load speeds, currents, and stall torques) that are relevant when you need higher continuous torque without an excessive length penalty (INEED 12V 030 gear reduction product page).
Pros: significantly more continuous torque capacity and torque headroom for misaligned or cold-bound deadbolts; metal planetary geartrains and multiple-stage options improve durability under repeated actuations; INEED’s pages show extensive customization (body length, shaft shape/length, connectors, encoder options) which is practical for retrofit housings that need nonstandard shafts or short overhangs.
Constraints: larger diameter (Ø16 mm) than N20s, generally higher peak current draw and cost, and longer procurement lead if heavy customization is requested. Also, the product pages do not display a standalone RoHS/REACH declaration—ask suppliers for dated RoHS statements and REACH (Article 33) SVHC screening for gears, housings, and lubricants when RFQ’ing.
Who it’s for: doors that exhibit running torque above ≈1.5 kg·cm, frequent-access installations, or climates where friction rises in cold weather; use a 16 mm planetary when you need conservative torque margins and customization for shaft or mounting details.
Evidence: sample torque/current/speed rows and ratio options are provided on INEED’s product pages for quick reference and RFQ starting points—see the 16mm 12V DC Motor with Planetary Gearbox and the 12 Volt 030 Gear Reduction Motor for specific example tables and customization options (INEED 16mm planetary product page; INEED 12V 030 gear reduction product page).
Note: those pages provide tabulated no-load/on-load/stall points but not graphical speed–torque curves; request speed–torque curves and recommended continuous torque from the vendor for final sizing and thermal/duty-cycle analysis.
Torque and sizing: how much “N20 gear motor deadbolt torque” do you need?
Start by measuring your lock’s running torque through the full bolt throw under worst-case conditions (e.g., chilled door, slight misalignment). Suppose you record 1.0 kg·cm running torque. A conservative design uses 2–3× margin, targeting 2.0–3.0 kg·cm capability. Think of stall torque like a redline—it’s useful for understanding limits, but you don’t cruise there.
Practical rules of thumb:
- Measure running torque; then size so that continuous operation sits at ~25–50% of stall.
- Choose ratios that keep actuation within ~1–2 seconds while staying inside battery and driver current limits.
- Use control features (soft start, current limiting) to avoid stalls and tooth shock.
As context, BHMA highlights for residential deadbolt operation discuss torque thresholds for smooth actuation and certification testing; see the BHMA A156.40 Hardware Highlights (2019) for the framework used by certifiers. Design engineers typically validate in situ because door fit and weather drive friction more than nominal specs.
Gear materials and compliance: metal vs. plastic, REACH/RoHS
Metal gearboxes (brass/steel) usually tolerate higher continuous loads and wear better under deadbolt conditions. Plastic gears (POM/PA/nylon) can sound quieter at light load but are less tolerant of sustained torque. Whatever you pick, confirm compliance across homogeneous materials:
- RoHS: check restricted substances in each part—lead, cadmium, mercury, hexavalent chromium, and certain flame retardants and phthalates. The European Commission’s overview of the directive lists thresholds and exemptions; see the EC’s RoHS Directive page.
- REACH: if any SVHC exceeds 0.1% w/w in an article, suppliers must disclose the substance name and safe-use info. Review obligations on ECHA’s Candidate List page.
- Don’t forget lubricants: screen greases and oils for SVHCs; keep dated material declarations and lab reports (XRF/ICP-MS) for gears, housings, coatings, adhesives, and wire insulation.
Battery and duty-cycle planning
Higher ratios boost torque but slow speed. N20s may draw from tens of milliamps at no load to hundreds of milliamps near heavy load (and >1 A near stall in higher-power variants). 16 mm planetaries can draw similar or higher currents depending on motor type.
Guidance:
- Match voltage to battery chemistry and driver capabilities; ensure peak current delivery (internal resistance) supports brief torque spikes.
- Keep typical actuation around 1–2 seconds; avoid prolonged near-stall operation.
- Consider closed-loop control to cap current and protect gears; add thermal considerations for frequent duty cycles.
Noise and installation tips
Plastic gears often sound smoother at light loads; metal geartrains can feel mechanically tighter and may produce higher perceived noise under load. Mounting matters: rigid housings can amplify gear noise, while damping pads and controlled acceleration profiles reduce audible chatter. If noise is a priority, validate with assembled prototypes and consistent measurement setups rather than relying on catalog claims.
When to step up to a 16 mm planetary
If your measured running torque nudges past ~1.5 kg·cm or your door shows binding in winter, planetary gearboxes supply the margin that keeps actuation reliable over years of use. They’re also a safer bet for high-frequency access, where heat and wear accumulate. Accept the larger diameter and budget for stronger drivers and batteries; the trade buys you torque headroom and durability.
Compliance checklist for RFQs (copy/paste)
- Provide RoHS declarations with thresholds for each homogeneous material; note any applicable exemptions.
- Provide REACH Article 33 statements and SVHC screening for gears, housings, coatings, wire insulation, and lubricants.
- Specify gear material grades (e.g., brass/steel type; POM/PA variant), coatings, and lubrication type.
- Include dated test reports (XRF/ICP-MS) or material declarations for metals and polymers.
- Confirm gearbox ratio, rated torque, and recommended continuous torque; provide speed–torque curves when available.
FAQ
- How much safety margin should I use for a deadbolt? Aim for 2–3× above measured running torque so that cold-weather friction and misalignment don’t stall the motor.
- What gear ratio should I pick? Choose the lowest ratio that meets torque needs while keeping actuation within ~1–2 seconds and staying inside battery/driver current limits.
- Do plastic gears ever make sense in deadbolts? Only when measured running torque is very low and noise is a top priority—and you’ve validated wear life under worst-case conditions.
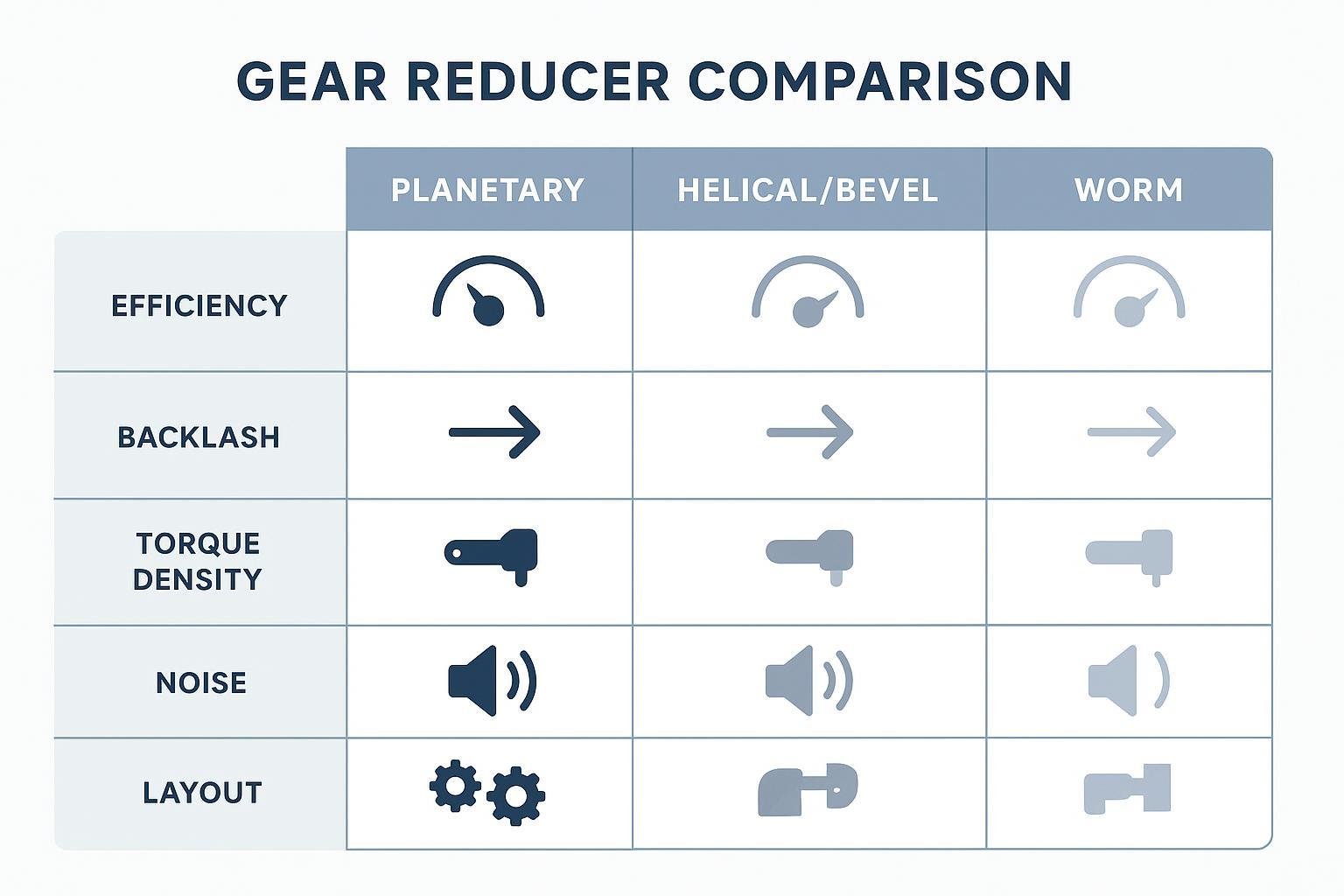
- Is there a self-locking option to save power? Worm gearboxes can hold position without current, but they change efficiency and backlash characteristics; evaluate carefully if standby draw is a concern.