Introduction
Planetary gear motors often get skipped in early architecture discussions. Teams default to spur gear motors because they’re simple and familiar, or to worm gear motors because “self-locking” sounds like free safety. Planetary gear motors can look like a premium choice you only reach for when everything else fails.
That habit leaves performance on the table—especially in compact products where the drive has to live inside a tight envelope and still hit torque, efficiency, and control targets.
What you gain with planetary gear motors (when you spec and integrate them correctly) is a useful combination: high torque density, high efficiency, low backlash potential, and controllable noise. In the 6–42mm size class, those traits are often the difference between “meets spec in a lab” and “meets spec in a real assembly after tolerance stack-up and duty-cycle heating.”
This article focuses on practical application: how to decide where planetary gear motors fit in medical devices, robotics, security, and consumer products—then how to select, integrate, and validate them without getting surprised in DVT.
Why they’re underrated
Planetary gear motors myths
A lot of the debate collapses into the same engineering questions: torque density, efficiency, and control behaviors like planetary gear motor backlash under direction changes.
Myth 1: “Planetary is only for robotics or high-end servo systems.”
Planetary gear trains show up anywhere you need coaxial packaging and torque multiplication without sacrificing too much efficiency. They’re common in industrial automation, but the same geometry is equally useful in compact product drives.
Myth 2: “They’re always noisy.”
Noise is less about the word “planetary” and more about gear quality, alignment, and how you support the output shaft. If you treat the gearbox as a structural element (and not just a torque multiplier), you can keep noise repeatable and measurable.
Myth 3: “Backlash is fixed—if you need precision, pick a different gearbox.”
Backlash is partly a design choice (tolerance class, stage count, preload strategy) and partly an integration outcome (load direction changes, compliance in couplings, bearing support). It’s not a single catalog number that magically holds in your assembly.
Key Takeaway: Planetary gear motors aren’t underrated because they lack benefits—they’re underrated because teams underestimate how much selection and integration controls the outcome.
Torque density and efficiency
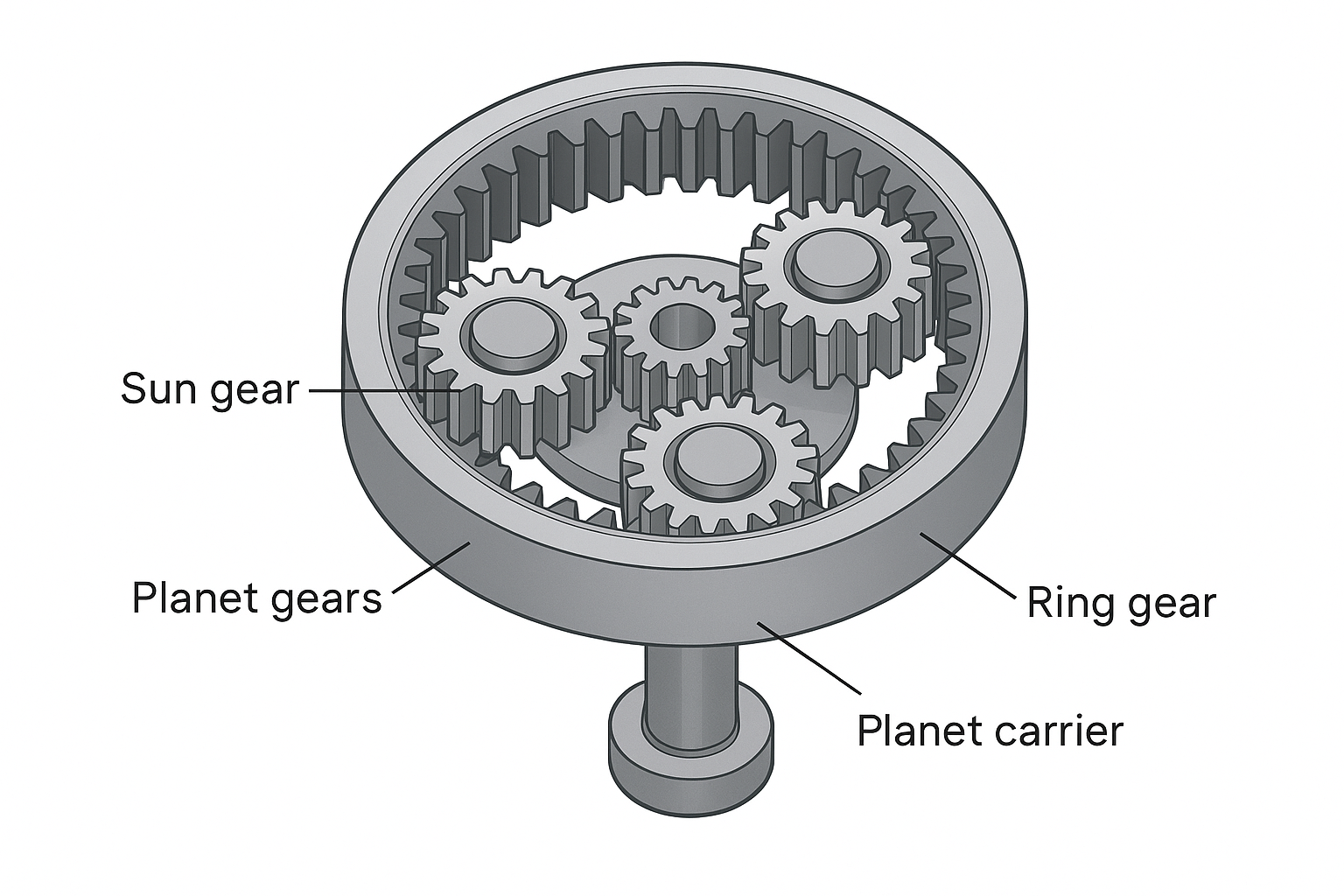
A planetary set shares load across multiple planets, which is a big reason it can deliver higher torque density in a similar package. That’s the core mechanical advantage that spur gear trains can struggle to match in the same diameter.
Efficiency is the other quiet win. Worm drives are sometimes chosen for packaging or self-locking, but their sliding contact typically costs you efficiency and becomes heat you have to manage. General comparisons like Delta Line’s overview of planetary, spur, and worm gearboxes summarize this trade-off well: planetary tends to be compact and efficient; worm tends to trade efficiency for its geometry and behavior.
For battery-powered products, that efficiency gap is not academic. It changes motor temperature rise, driver sizing, and ultimately how conservative you have to be with duty cycle.
Backlash, stiffness, noise
In real products, backlash, stiffness, and noise are linked. If your application repeatedly reverses direction or crosses through low-torque regions (think: gimbal stabilization, smart lock latch settling, or a gripper “feeling” for contact), backlash shows up as delay and deadband. Stiffness controls how much torsional wind-up you see under load, which becomes control error.
Noise is where teams get surprised. With a micro gearbox, a small gear mesh error can become audible once it’s coupled into a resonant housing. Backlash choices can influence vibration and noise; for example, a 2025 study on optimal backlash settings in planetary gearboxes reports measurable vibration and noise changes when backlash is tuned.
The practical point: don’t treat backlash and noise as separate checkboxes. If you tighten backlash targets without thinking about lubrication, alignment, and bearing support, you can create new failure modes.
Real applications
Medical and clinical devices
Medical devices reward predictable performance: stable flow, consistent torque, and controlled noise. Planetary gear motors are often a good fit when you need torque density and coaxial packaging to keep the drive compact.
Typical “planetary makes sense” patterns:
Small pumps and dosing systems where you need repeatable output torque at low speed without losing too much efficiency.
Handheld clinical tools where battery life and temperature rise matter.
Quiet actuation where mechanical noise becomes a perceived-quality issue.
Design tip: treat duty cycle and temperature rise as primary requirements, not afterthoughts. A gearbox that’s efficient on paper still needs validation under your load profile and enclosure conditions.
Robotics and end-effectors
In robotic end-effectors, planetary gear motors show up when you need compact torque at the joint or at the gripper, but you don’t want a wide gearbox that complicates cable routing or reduces stiffness.
Where planetary is often underused:
Compact grippers that need torque to clamp without a bulky transmission.
Small linear actuators where coaxial packaging simplifies mechanical layout.
Backdrivable designs where you want controlled compliance (and you’re intentionally not relying on worm self-locking).
If you’re fighting “it works until it touches the real world,” check your mechanical support. Overhung loads and poorly supported output shafts are a common route to early wear.
Security and consumer uses
Security and consumer devices sit in an awkward middle: they often need high torque in small spaces, but they also need low noise and consistent feel.
Planetary gear motors can be a strong choice for:
Smart locks where the latch/bolt actuation has to overcome friction and misalignment while staying quiet.
Camera gimbals and compact stabilizers where control smoothness and backlash behavior matter.
Small appliances and mechanisms where efficiency turns into less heat and longer battery life.
The rule of thumb: if your product needs “high torque, coaxial packaging, and controllable noise” at micro scale, planetary is usually worth evaluating early.

Selection and integration
Define performance needs
Start by turning the vague requirement (“high torque, low noise”) into numbers you can validate:
RMS and peak torque at the output (and what causes peaks: stall events, impacts, friction spikes).
Output speed range and whether speed regulation matters.
Duty cycle + ambient (continuous vs intermittent, enclosure thermal resistance).
Backlash target in degrees or arc-min at the output in your assembly, not just in the gearbox.
Noise metric (dBA at a defined distance, frequency bands if relevant).
For micro planetary gear motors, define the mechanical loads too: radial load, axial load, and any overhung load from gears, pulleys, or off-axis couplings. These often decide life more than the torque number.
If you need a starting point for available ranges in the 6–42mm class, use an internal reference like INEED Motors planetary gear motors (6–42mm) to ground the discussion in feasible voltage (2–24V DC), speed (5–2000 rpm), and torque ranges.
Design decisions that matter
A planetary gearbox rarely fails because “planetary is bad.” It fails because one integration decision quietly created overload or starvation.
High-leverage decisions:
Stage count vs ratio vs efficiency
More stages can hit higher ratios, but each stage adds loss, tolerance stack-up, and potential noise sources. If you can meet torque with a lower ratio and a slightly larger motor, you may end up cooler and quieter.
Output shaft support
If your output sees overhung load, don’t ask the gearbox bearings to do structural work they weren’t selected for. Consider external bearing support or a layout that reduces bending moment.
Coupling compliance
Soft couplings can hide misalignment but introduce torsional compliance, which shows up as control error and can worsen backlash feel. Stiff couplings can transmit misalignment into bearing wear. Decide intentionally.
Noise path management
The gearbox is not your speaker—the enclosure is. Add damping, control fit, and avoid long, thin resonant panels near the gearbox mount. Validate early with the real housing, not an open-bench fixture.
⚠️ Warning: If you specify “low backlash” but ignore shaft support and alignment, you often get the worst combination: higher stress and higher noise.
Compliance and support
At decision stage, supplier support and documentation are part of the engineering requirement. Two projects with identical torque specs can have very different risk profiles depending on how fast you can iterate and how cleanly you can close compliance questions.
For OEM programs that need customization (shafts, connectors, encoders, gear ratio tuning) plus documentation support, it’s reasonable to evaluate partners that can respond quickly and provide engineering artifacts. For example, INEED Motors highlights custom planetary options, fast engineering response (typically <8h), and environmental compliance support (REACH/RoHS). If you’re moving from DVT into MP, this is often more valuable than shaving a few cents off unit price.
If you want to pressure-test fit quickly, route the conversation through INEED Motors engineering support and ask for the three things that shorten validation cycles: (1) test conditions behind the torque/speed curves, (2) recommended load limits for your shaft layout, and (3) a proposed validation plan.
Planetary vs spur and worm
Efficiency and energy use
If you’re searching for a practical spur vs planetary gear motor answer, start with losses and heat: efficiency differences show up as battery life, temperature rise, and driver sizing.
Efficiency is a system decision. It affects battery life, driver current, and how conservative you have to be with duty cycle. Planetary gearboxes often provide a better efficiency baseline than worm drives because they avoid as much sliding friction.
If your baseline option is worm because you want packaging or self-locking, it’s still worth sanity-checking the energy trade-off with a neutral guide like a worm vs planetary gearbox guide by Technische Antriebselemente. Heat in a micro enclosure is usually the constraint you hit first.
For a simpler, cost-driven build where torque demands are modest, spur gear motors can still be the correct choice. If you’re comparing options on the INEED site, start with the category-level references for spur geared motors and weigh packaging and durability against your torque margin.
Precision and control
If you care about positioning, settling, or smooth control, prioritize stiffness and backlash behavior—not just torque.
Planetary gear motors are often easier to package coaxially with better torsional stiffness than a long spur train, which can help control. If you’re using a BLDC platform or want longer life at higher duty cycles, it can also make sense to evaluate a BLDC geared approach via brushless gear motors.
When worm self-locking wins
When the requirement is worm gear motor self-locking (holding without power), that single constraint can outweigh the efficiency hit.
Worm self-locking is real value when you need holding torque without power, or when backdriving would be unsafe or unacceptable for user experience.
Worm can win when:
You need passive holding (no brake, no continuous power draw).
A backdrive event could cause a safety or security issue.
Your mechanism naturally fits a right-angle layout.
If those are your true requirements, worm gear motors (like the families shown under worm gear motors) can be the right choice even if you accept the efficiency penalty.
Failure modes and reliability
Common micro-scale failures
Miniature planetary gearboxes concentrate a lot of work into small components. The most common failure patterns are consistent across industries:
Planet bearing/bushing wear from overhung load, misalignment, or contaminated lubrication.
Tooth flank pitting and wear from overload, shock, or poor lubrication film.
Lubrication starvation or migration (grease moved away from the mesh, incompatibility, or drying/bleed over time).
Uneven load sharing across planets due to tolerance stack-up or housing distortion.
General gearbox references like DXTL’s overview of common gearbox failure modes describe the same root causes (bearing issues, lubrication, surface fatigue). In micro gearboxes, you just have less margin.
Mitigations and design knobs
Reliability is not one knob. It’s a set of “small” decisions that either stack in your favor or quietly cut life in half.
Mitigation levers you can control:
Load path control: reduce overhung loads; add external bearing support when needed; keep couplings aligned.
Torque margin: treat stall as a real operating point unless you can guarantee it never happens; size for peak events.
Lubrication selection: use grease/oil compatible with plastics (if any), temperature range, and expected life; consider migration risk in your orientation.
Housing stiffness: avoid mounts that distort the gearbox under screw torque; check flatness and clamp forces.
Backlash strategy: tight backlash can reduce deadband but can increase sensitivity to misalignment—validate both noise and life.

Testing and validation checks
If you want fewer surprises between EVT and MP, validate the gearbox like a subsystem, not a catalog part.
Practical checks that catch the usual failures early:
Thermal mapping under real duty cycle
Instrument motor case and gearbox region; run the real load profile inside the real enclosure.
Noise and vibration characterization
Measure dBA at a fixed distance and record spectra if noise is critical. Test multiple units to see variation.
Backlash and settling test
Command small reversals and measure deadband/settle time at the output. Repeat at temperature extremes.
Endurance run with representative loads
Run long enough to see early wear trends; inspect for grease migration and wear debris.
Misalignment sensitivity test
Introduce controlled misalignment (within realistic assembly limits) and watch noise/temperature/life trends.
Pro Tip: If your first prototype “sounds fine” on an open bench, repeat the test with the gearbox mounted in the final housing. Enclosures amplify what bench fixtures hide.
Conclusion
Planetary gear motors are often overlooked because they’re treated like a premium option instead of a design tool. In real products—especially in the 6–42mm range—they can unlock torque density and efficiency that’s hard to match with spur trains, while keeping backlash and noise controllable when you integrate the gearbox correctly.
The practical next steps are straightforward:
Define performance needs in terms you can validate (RMS/peak torque, duty cycle, backlash, noise).
Make the integration decisions that drive reliability (shaft support, alignment, lubrication, housing stiffness).
Compare planetary vs spur and worm based on system constraints—not tradition.
Validate early with thermal, noise, backlash, and endurance checks so DVT doesn’t become a redesign.
FAQ
1) When is a planetary gear motor the wrong choice?
If you need passive holding without power (true self-locking), have a strict right-angle layout constraint, or your mechanism can’t tolerate any backdriving, a worm gear motor or a brake solution may be a better fit. Planetary is strongest when you want coaxial packaging, good efficiency, and controllable backlash—not when “no motion without power” is the primary requirement.
2) How do I set a realistic backlash target for my product?
Start with what your control loop and mechanism can tolerate at the output: define allowable deadband in degrees/arc-min, then test it in your assembly with the real coupling, shaft support, and load direction changes. Catalog backlash is a starting point; enclosure stiffness, overhung load, and compliance can easily add more “feel” than the gearbox spec suggests.
3) What’s the fastest way to validate a micro planetary gearbox before DVT?
Run a short, instrumented check in the final housing: (1) thermal rise under your real duty cycle, (2) noise at a fixed distance (and spectrum if noise is critical), and (3) small-reversal backlash/settling behavior. If any of these drift with temperature or unit-to-unit variation, fix shaft support/alignment and ratio selection early—before endurance testing consumes your schedule.
If you’re selecting a custom planetary solution and want to de-risk fit quickly, use a short application review with a supplier that can turn engineering feedback fast—then confirm performance with your own instrumented validation plan.