Project Challenge:
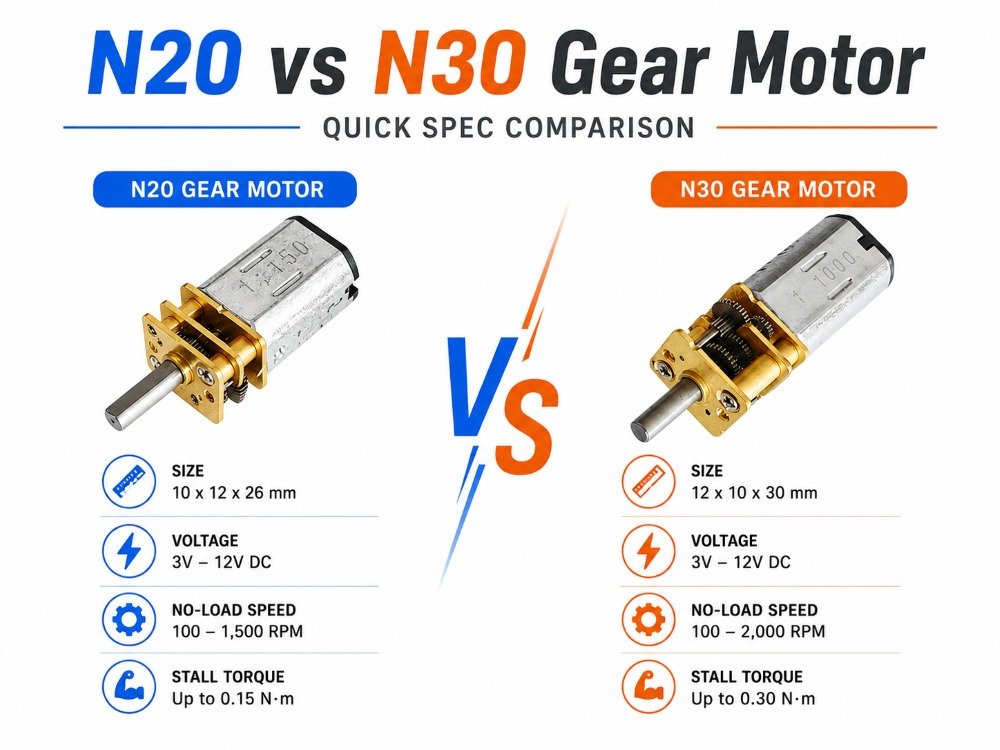
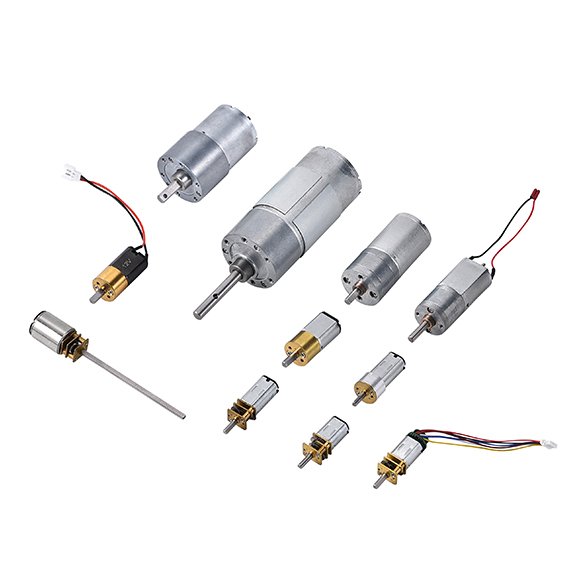
A humanoid robot company recently approached INEED Motors. Their company is designing a humanoid manipulator. To mimic the human hand and have the talent of the human hand, the robot fingers need multiple axes of motion. The maximum speed of the micro metal gearmotor will be 60rpm, with a diameter of about 10mm and a length of about 30mm.
It is proposed that because it is modeled on the movement of human fingers, the micro-gear drive will require continuous cycling and change the direction of rotation from 0 to 60 rpm.
Solution:
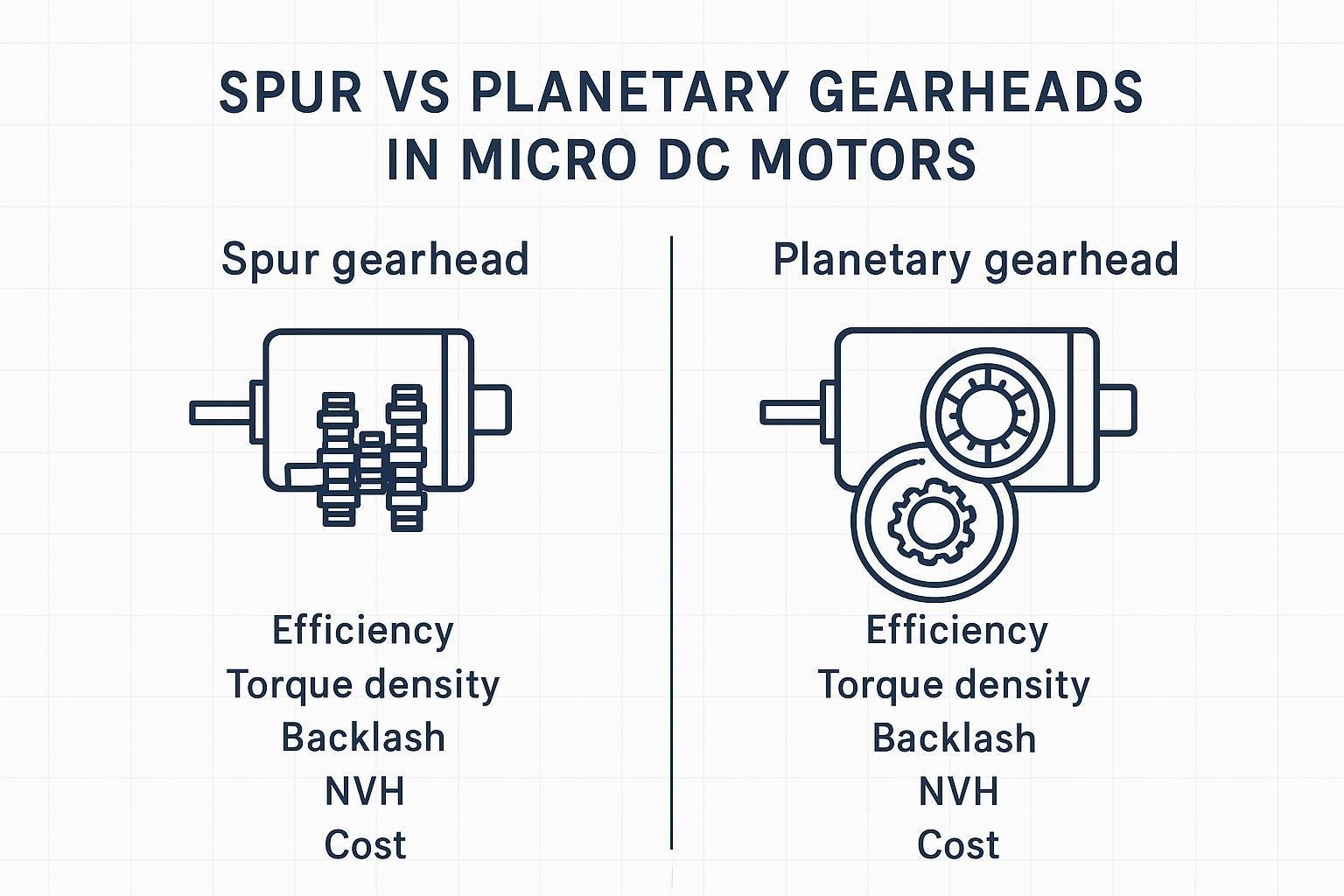
Our engineering team carefully studied the customer’s needs and combined them with our previous experience in humanoid robots. We recommend our customers use our 6mm planetary gear motor. The three-stage gear drive can meet the output speed and torque required by customers, and the multiple-gear drives are superimposed on each other. It is designed to allow both forward and reverse rotation.
Results:
The customer feedback is that the unit price of our gear motor is very reasonable. Their teams will discuss to determine the specifications. And hope they can submit an order in the next week or so. INEED Motors will give back to our valued customers with a more professional and enthusiastic attitude.