You begin setting and verifying backlash and stiffness specs for planetary gear motors by knowing your application accuracy, load, and response needs. Precision matters most when you want stable performance in demanding environments. INEED planetary gear solutions help you meet strict requirements for positioning accuracy and uptime. Proper specs keep your system reliable and protect every motor from costly errors. You see the results in every precise move your gear motor makes.
Key Takeaways
Start with your application’s accuracy, load, and response needs. Then convert those needs into clear backlash and stiffness targets.
Use low backlash for precise reversals. Use high stiffness to reduce twist, improve settling time, and keep motion steady under load.
Test the full assembly, not just the gearbox. Couplings, mounts, and frames can add play and hurt real precision.
Write specs with clear units, load, direction, temperature, and reference points. Clear test rules make results repeatable and trustworthy.
Avoid extreme targets without a real need. Balanced specs cut cost, simplify assembly, and still protect accuracy and reliability.
Backlash and Stiffness Specs: The Foundation
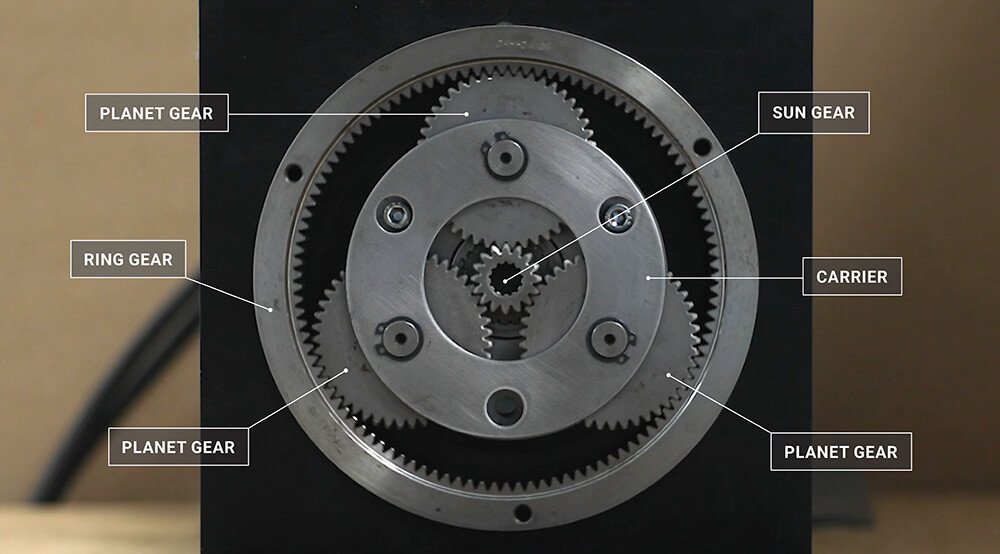
Defining Backlash in Planetary Gear Motors
Backlash is the small space or lost motion between the teeth of two gears in a planetary gear system. You measure it at the pitch circle diameter, where the gears mesh. In a planetary gearbox, backlash can show up as a slight delay or play when you change the direction of rotation. This lost motion affects how precisely the output follows your commands. You may see different types of backlash, such as angular, radial, or axial, but angular backlash is most important for precision gears. INEED’s quality standards keep backlash within tight limits to ensure high performance in every planetary gear motor.
Tip: Lower backlash means your planetary gear system responds more accurately to every movement.
Understanding Torsional Stiffness
Torsional stiffness describes how much a planetary gearbox resists twisting when you apply torque. High torsional stiffness means the gearbox holds its position firmly, even under load. You want high stiffness in precision gears because it reduces elastic twist and keeps the output steady. INEED’s planetary gear motors use continuous tooth engagement and careful assembly to maximize stiffness. This approach helps you achieve reliable performance in demanding environments.
Here is a quick look at typical values for planetary gearboxes by class:
Gearbox Class | Backlash (arcmin) | Torsional Stiffness (Nm/arcmin) |
|---|---|---|
Standard | 15–30 | 0.5–1.5 |
Precision | 5–15 | 1.5–3.0 |
High-Precision | <5 | >3.0 |
Why Specs Matter for Precision
You need tight backlash and stiffness specs for precision applications like robotics, medical devices, and construction tools. Low backlash improves positioning accuracy and repeatability because there is less play when you reverse direction. High torsional stiffness keeps the output from twisting under load, so your device stays on target. When you set and verify these specs, you protect your system’s performance and reliability. INEED’s precision gears deliver the accuracy you need for every move, every time.
Backlash and stiffness specs form the backbone of reliable planetary gear performance.
You see the benefits in faster settling times, better repeatability, and higher positioning accuracy.
Setting Backlash Targets for Planetary Gearboxes
Application Needs and Lost Motion
You should set backlash targets from the real motion needs of your application. Start with the allowed output error. Then assign part of that limit to a backlash budget. This step gives your team a clear calculation path.
A simple measurement list helps:
Define required output angle or linear accuracy.
Convert that need into angular lost motion.
Set a backlash budget for the drivetrain.
Reserve margin for couplings, bearings, and load effects.
Verify the target on the final planetary gearbox.
If you are learning how to choose a planetary gearbox, begin with load, speed, duty cycle, and positioning error. That method improves performance and keeps the spec practical. It also supports understanding planetary gearbox ratios, because ratio changes affect output speed, reflected inertia, and gear stage selection.
Tip: Use the tightest target only when the application truly needs it. A balanced backlash budget usually gives better cost control and stable performance.
Motion Reversal and Accuracy
Direction changes reveal lost motion fast. If your application reverses often, you need a lower backlash target. Servo axes, inspection tools, and indexing systems all depend on fast, repeatable reversal. Your calculation should compare commanded angle change with allowed output error during reversal.
Here are typical target ranges:
Class | Typical backlash target |
|---|---|
Standard control | 15–30 arcmin |
Precision motion | 5–15 arcmin |
High-accuracy indexing | <5 arcmin |
A planetary gearbox with the right target improves accuracy during starts, stops, and reverse moves. This choice also supports long-term performance in demanding applications.
INEED Product Considerations
INEED offers planetary motor options from 6mm to 42mm, so you can match the planetary gearbox to your application size and duty. For compact instruments, the 6mm series fits tight spaces and supports precision control. For higher load needs, a metal gear solution adds strong, consistent performance.
Use one more calculation before release: compare measured output play to the backlash budget at the shaft. Then confirm the same result on the planetary gearbox under defined torque and direction. That process helps you select the right planetary gear motor with confidence.
Setting Stiffness Specs for Precision Motion
Torque Load and Angular Deflection
You set stiffness specs by linking output torque to allowed twist angle. Start with the application limit for angular error. Then do a simple calculation to convert torque and deflection into a target for the planetary gearbox. This step gives you a clear rule for precision motion.
Use this measurement list:
Define peak and rated output torque.
Define allowed angular deflection.
Run the calculation for Nm per arcmin.
Add margin for the gear train, shaft, and load path.
Verify the planetary gearbox at the output reference point.
A simple rule helps:
stiffness target = torque / angular deflection
The result supports better performance under load. It also supports gear strength and life calculation during product selection.
Class | Typical deflection under rated load | Typical target |
|---|---|---|
Standard | 8–15 arcmin | basic control |
Precision | 3–8 arcmin | accurate positioning |
High-precision | 1–3 arcmin | tight servo control |
Tip: Lower angular deflection usually improves performance when your application must hold position under torque.
INEED Gear Motor Solutions
INEED gives you compact options for different applications. The 6mm planetary solution fits small instruments that need stable performance in tight spaces. The 6mm metal planetary gear motor suits higher-load tasks that need firm response and consistent gear engagement. In both cases, you should match the spec to the real application, then verify dynamic performance with test torque, angle, temperature, and speed. That process helps you choose a planetary platform with confidence for long-term performance.
Factors Affecting Backlash and Stiffness in Planetary Gear Motors
You need to understand what affects backlash and stiffness if you want the best performance from your planetary gear system. Several design and assembly factors play a big role in how precision gears behave. You can control these factors to improve accuracy, efficiency, and maintenance.
Gear Quality and Stage Count
Gear quality sets the foundation for precision gears. High-quality gears have smooth surfaces and tight tolerances. You get less backlash and more consistent performance. The number of stages in a planetary gearbox also matters. More stages can increase backlash if you do not control the build. You should choose the right stage count for your application. INEED uses advanced gear cutting and grinding to keep precision gears within strict limits.
Factor | Standard Class | Precision Class | High-Precision Class |
|---|---|---|---|
Good | Very Good | Excellent | |
Stage Count | 2–3 | 2–3 | 1–2 |
Backlash (arcmin) | 15–30 | 5–15 | <5 |
Bearings, Housing, and Preload
Bearings support the gears and keep them aligned. Good bearings reduce play and help precision gears hold their position. The housing must be strong and rigid. A weak housing lets the gears move, which increases backlash. Preload means you set the bearings and gears with a small force to remove gaps. You should always check preload during assembly. INEED’s inspection team checks every housing and bearing for fit and alignment before final assembly.
Assembly and Tolerances
Assembly quality has a big impact on precision gears. Small errors in alignment or fit can increase backlash and reduce stiffness. You need tight tolerances for every part. INEED uses 100% inspection of key processes to make sure every planetary gear motor meets the right specs. You should also plan regular maintenance and inspection to keep performance high over time.
Tip: Always review the assembly process and check tolerances to avoid problems with backlash and stiffness.
Main factors to monitor:
Gear quality and finish
Number of stages
Bearing type and preload
Housing rigidity
Assembly accuracy
Tolerance control
Regular maintenance and inspection
You can achieve the best results by focusing on these factors. Precision gears from INEED deliver reliable performance and long service life when you follow these guidelines.
Backlash vs. Stiffness: Precision in Practice
Interaction and System Compliance
You might think that choosing a planetary gear system with low backlash will always give you high precision. In reality, true precision depends on more than just the gear specs. If the rest of your mechanical system has compliance—meaning parts can flex or twist under load—you can still lose accuracy. Even the best planetary gear can only perform as well as the system around it.
For example, in a high-precision robotic joint, you need both low backlash and high torsional stiffness. If you ignore system compliance, you may see unexpected movement or vibration, especially during fast direction changes. This can affect dynamic performance and reduce the accuracy of your application.
Here is a simple measurement list to help you check system compliance:
Measure total output movement with no load.
Apply rated torque and measure angular deflection.
Compare the measured deflection to your target.
Check for extra movement in couplings, mounts, or frames.
Class | Backlash (arcmin) | Stiffness (Nm/arcmin) |
|---|---|---|
Standard | 15–30 | 0.5–1.5 |
Precision | 5–15 | 1.5–3.0 |
High-Precision | <5 | >3.0 |
Note: Always test the full assembly, not just the gearbox, to ensure your application meets its precision goals.
Achieving True Precision
You achieve true precision when you balance low backlash, high torsional stiffness, and overall system rigidity. In precision applications, such as robotics or medical devices, you must consider every part of the system. Harmonic drives can help you reach low backlash, while dual-path gearboxes increase rigidity by splitting the load across two gear trains. This approach minimizes hysteresis and supports high dynamic performance.
INEED planetary gear motors deliver reliable performance in demanding applications. When you use these motors in your design, always verify both the gear specs and the system’s mechanical structure. This ensures your application maintains accuracy, even under changing loads or rapid movements.
Remember, low backlash alone does not guarantee precision. You need to control compliance throughout the entire system to get the best results from your planetary gear motor.
Writing and Verifying Backlash and Stiffness Specs
Specification Details and Test Conditions
You need to write clear backlash and stiffness specs for your planetary gearbox. Start by listing all the details that affect precision gears. Each spec should include:
Units: Use arcminutes for backlash and Nm/arcmin for stiffness.
Load: Specify the torque applied during testing.
Direction: State if you measure backlash in both clockwise and counterclockwise directions.
Temperature: Record the ambient temperature during measurement.
Reference Point: Identify where you measure on the planetary gearbox output shaft.
Acceptance Criteria: Set limits for maximum allowable backlash and minimum stiffness.
You protect your application by defining these conditions. If you skip any detail, you risk inconsistent performance or missed targets. Always use the same test conditions for every planetary gear motor you inspect.
Tip: Write your specs so anyone can repeat the test and get the same result.
Measurement Methods for Planetary Gearboxes
You verify backlash and stiffness specs using proven methods for inspecting precision gears. You can use both analytical and functional inspection types. Analytical inspection diagnoses specific errors in gear profile, lead, and pitch. Functional inspection assesses overall performance by measuring composite error.
Here is a detailed list of measurement methods and parameters:
Backlash measurement: Rotate the output shaft in both directions and record the angular lost motion before the input shaft moves.
Torsional stiffness measurement: Apply a known torque to the output shaft and measure the angular deflection.
Single pitch deviation: Check the distance between adjacent gear teeth.
Total pitch deviation: Measure the overall deviation across the gear.
Total profile deviation: Inspect the shape of each gear tooth.
Total helix deviation: Measure the angle of the gear teeth helix.
Total radial composite deviation: Assess the radial deviation affecting gear meshing.
Runout: Measure the deviation in the rotational axis of the gear.
You can use dial indicators, torque sensors, and angular encoders for these tests. Always calibrate your tools before inspection. You should record every result for maintenance and quality control.
Measurement Type | Description |
|---|---|
Single pitch deviation | Deviation in the distance between adjacent teeth. |
Total pitch deviation | Overall deviation in the pitch across the gear. |
Total profile deviation | Deviation in the tooth profile shape. |
Total helix deviation | Deviation in the helix angle of the gear teeth. |
Total radial composite deviation | Overall radial deviation affecting gear meshing. |
Runout | Deviation in the rotational axis of the gear. |
Inspection Type | Main Goal | Typical Measurement |
|---|---|---|
Analytical | Diagnose Specific Errors | Profile, Lead, Pitch |
Functional | Assess Overall Performance | Composite Error |
You improve performance by using both types of inspection. Analytical methods help you find the root cause of errors. Functional methods show how the planetary gearbox works in real conditions.
Comparing INEED Test Data
INEED uses strict inspection and outgoing control processes to verify every planetary gear motor. You see the results in consistent precision gears and reliable performance. The inspection team checks gear quality, stage count, bearing preload, housing rigidity, and assembly accuracy. Each planetary gearbox undergoes 100% inspection of key processes.
You compare your test data to INEED’s typical values for backlash and stiffness. This step helps you confirm that your planetary gear motor meets the right class for your application.
Gear Motor Class | Backlash (arcmin) | Stiffness (Nm/arcmin) |
|---|---|---|
Standard | 15–30 | 0.5–1.5 |
Precision | 5–15 | 1.5–3.0 |
High-Precision | <5 | >3.0 |
You should always check your measured values against these targets. If your planetary gearbox falls outside the limits, review the assembly and maintenance steps. INEED’s outgoing control ensures every product ships with verified specs and documented test conditions.
Note: Regular inspection and maintenance keep your planetary gear motor performing at its best. You protect your investment and maintain precision over time.
You achieve reliable performance by writing clear specs, using proven measurement methods, and comparing your results to INEED’s standards. This process ensures your planetary gear motor delivers the precision your application needs.
Application Examples: Robotics, Healthcare, and More

Robotics and Servo Axes
You often see planetary gear systems in robotics because they deliver high torque and compact size. When you design a high-precision robotic joint, you need precision gears with low backlash and high torsional stiffness. This setup ensures your robot arm moves smoothly and stops exactly where you want. You should set your planetary gearbox specs based on the required accuracy and dynamic performance. For example, if your robot must repeat a position within 1 arc-minute, you need a planetary solution with minimal lost motion and high efficiency. Fast servo axes also benefit from high stiffness, which keeps the output steady during rapid direction changes. This approach improves both performance and reliability in precision applications.
Medical and Construction Devices
Medical devices and construction tools demand different planetary gear specs. In medical equipment, you need precision gears that guarantee accuracy and quiet operation. Construction devices, like land survey instruments, require robust gears that handle heavy loads and maintain performance over time. You should always define your core requirements first, such as speed, torque, and precision. Next, evaluate constraints like space, budget, and noise.
Here is a table showing typical targets for these applications:
Parameter | Target Value | Rationale |
|---|---|---|
Backlash | < 1 arc-minute | Guarantees positional accuracy |
Stiffness | > 150 Nm/arc-min | Prevents deflection under load |
Inertia | < 0.005 kg·m² | Enables fast, reactive motion |
You can follow this process:
Define core requirements for your application.
Evaluate constraints, including physical limits and acceptable noise.
Planetary gearboxes work well in these fields because they combine high torque density, compactness, and efficiency. They distribute load evenly, which boosts durability and reliability.
Choosing INEED Gear Motors
When you select a planetary gear motor for your application, you should match the specs to your real needs. For example, INEED’s 6mm planetary gear motor fits land survey instruments that need compact size and high precision. In body warmers for healthcare, the 6mm metal planetary gear motor provides the torque and reliability needed for safe, long-term use. You can use this measurement list to guide your choice:
Required output accuracy
Maximum allowable backlash
Minimum torsional stiffness
Expected load and duty cycle
Here is a table of typical values by class:
Class | Backlash (arcmin) | Stiffness (Nm/arcmin) |
|---|---|---|
Standard | 15–30 | 0.5–1.5 |
Precision | 5–15 | 1.5–3.0 |
High-Precision | <5 | >3.0 |
If you want to know how to choose a planetary gearbox, start with your application’s accuracy and load needs. Then compare those needs to the specs of available planetary gear motors. This method ensures you get high efficiency and reliable performance in every application.
Common Mistakes in Specifying Backlash and Stiffness
When you set up a planetary gearbox for your application, you want to avoid common errors that can hurt performance. These mistakes can lead to wasted time, higher costs, and poor results. Here are the top issues you should watch for:
Unrealistic Backlash Demands
You might think that the lowest possible backlash always gives the best performance. In reality, setting a backlash budget that is too tight can increase costs and make assembly harder. Not every application needs zero-backlash designs. For many planetary gear systems, a practical target works better. You should match the backlash value to the real needs of your application. If you set the target too low, you may face longer lead times and more difficult maintenance. INEED’s technical team can help you choose the right balance for your gear system.
Tip: Always check if your application truly needs the lowest backlash, or if a standard value will give you the efficiency and reliability you want.
Typical Backlash Values by Class:
Class | Backlash (arcmin) |
|---|---|
Standard | 15–30 |
Precision | 5–15 |
High-Precision | <5 |
Ignoring System Compliance
You may focus on the planetary gearbox and forget about the rest of the system. If you ignore compliance in couplings, frames, or mounts, you can lose accuracy even with the best gear. Always measure total system movement, not just the gearbox. This step helps you see if extra play or twist comes from outside the planetary gear. You should include all parts in your inspection and maintenance plan. INEED provides guidance to help you review the whole system for top performance.
Measurement List for System Compliance:
Measure output movement with no load.
Apply rated torque and check angular deflection.
Inspect couplings, mounts, and frames for extra movement.
Undefined Test Conditions
You need clear test conditions when you check planetary gear specs. If you skip details like load, direction, or temperature, your results may not match real-world performance. Always write down the test setup for every inspection. This practice lets you repeat tests and compare results over time. INEED’s support team can help you define the right test conditions for your application.
Note: Clear test conditions protect your application from errors and support long-term reliability.
By avoiding these mistakes, you improve the performance and efficiency of your planetary gear system. You also make maintenance and inspection easier for every application.
You get reliable results when you define motion accuracy, convert it into backlash and stiffness specs, then verify those limits under controlled conditions for your application. Use this quick check:
Set the error target.
Convert it to gear limits.
Test each planetary unit.
Confirm motor performance.
Class | planetary level |
|---|---|
Standard | basic precision |
tighter specs |
INEED supports precision work with dependable planetary solutions. A practical rule helps: specify what you must measure, then measure what you specify. ✅
FAQ
What is the best way to set precision gears specs for a planetary gearbox?
You should start with your application’s accuracy needs. Use a measurement list: define output error, convert to angular lost motion, set a backlash budget, and check the planetary gearbox. This approach helps you balance gear strength and life calculation with real-world performance.
Measurement List:
Define output accuracy.
Convert to angular lost motion.
Set backlash budget.
Reserve margin for couplings and load.
Verify on the planetary gearbox.
Class | Backlash (arcmin) | Stiffness (Nm/arcmin) |
|---|---|---|
Standard | 15–30 | 0.5–1.5 |
Precision | 5–15 | 1.5–3.0 |
High-Precision | <5 | >3.0 |
How do you perform inspection and maintenance of a planetary gearbox?
You should use methods for inspecting precision gears, such as measuring backlash, torsional stiffness, and gear profile. Regular inspection and maintenance of a planetary gearbox keep your system reliable and extend gear life. Always record results for future reference.
Why does understanding planetary gearbox ratios matter in applications?
Understanding planetary gearbox ratios helps you match output speed and torque to your application. The right ratio improves efficiency and ensures precision gears deliver the required performance. This knowledge supports how to choose a planetary gearbox for different applications.
What are common signs that precision gears need maintenance?
You may notice increased noise, vibration, or lost motion in the planetary gearbox. These signs mean you should schedule inspection and maintenance. Early action prevents damage and keeps your precision gears working at peak performance.
How do you verify calculation results for precision gears in real applications?
You should compare your calculation results with actual inspection data. Test the planetary gearbox under defined load and temperature. Confirm that backlash and stiffness meet your application’s targets. This process ensures your precision gears deliver consistent performance.