Selecting the right gearmotor for your automation project can feel overwhelming. You face many technical requirements, such as speed, torque, and space constraints. If you do not match the motor and reducer to your needs, you risk costly mistakes. Some of the most common issues include:
Choosing a gearmotor without considering your application’s requirements
Overloading the gearmotor, which can cause quick wear or failure
Ignoring the operating environment, leading to reduced durability
INEED Motors specializes in small gear motors and custom solutions. You get expert support to help you avoid these pitfalls and achieve reliable performance.
Key Takeaways
Identify your application needs by considering torque, speed, and duty cycle. This ensures the gearmotor meets your specific requirements.
Calculate the required torque and output speed using the correct formulas. Accurate calculations prevent costly mismatches and system failures.
Choose the right gearmotor type based on your application. Options include planetary, worm, and brushless DC gearmotors, each with unique strengths.
Match the motor and reducer carefully to optimize performance. Ensure their specifications align to avoid compatibility issues.
Validate your selection through prototype testing. Monitor performance metrics to confirm the gearmotor meets your operational needs.
Define Application Needs
Performance Criteria
You need to start by identifying the main performance criteria for your project. Every gearmotor must meet specific application requirements to deliver reliable results. Consider the following factors:
Torque: The gearmotor must provide enough force to move the intended load.
Rotation speed: You need to match the speed to your process for optimal efficiency.
Ideal reduction ratio: This helps balance speed and torque for your application.
Duty cycle: The gearmotor should handle the expected operating schedule without overheating.
Gearhead efficiency: High efficiency ensures less energy loss and better performance.
Safety requirements: Always check for thermal protection and safe operation.
INEED Motors offers custom solutions for small gear motors. You can adjust dimensions, internal structures, and technical parameters to match your performance needs. For example, you may need a gearmotor with high torque and compact size for low-speed applications in medical devices or smart appliances.
Space and Environment
Space constraints often shape your gearmotor selection. You must choose a gearmotor that fits your available space and meets your application requirements. Compact gearmotors from INEED Motors integrate easily into tight spaces. Mounting options and thermal ratings help prevent alignment issues and overheating.
Environmental factors such as temperature, humidity, and dust affect gearmotor performance. High temperatures can degrade lubricants, while humidity may cause corrosion. Dust can lead to abrasive wear. You should select gearmotors designed for your operating environment to ensure long-term reliability.
Worm gearmotors provide high torque in compact spaces. They are essential in industries where precise motion control and space constraints matter.
Duty Cycle and Power Source
Duty cycle describes how long and how often your gearmotor runs. You must match the gearmotor to your load and duty cycle to avoid overheating and inefficiency. Here is a quick overview:
Duty Cycle Type | Description | Applications |
|---|---|---|
Continuous Duty (S1) | Runs at constant load until thermal equilibrium. | Conveyor belts, water pumps |
Short-Time Duty (S2) | Operates for a set time, then cools. | Emergency fans, machine tool feed motors |
Intermittent Periodic Duty (S3) | Cycles on and off; never reaches thermal equilibrium. | Cranes, automated production line motors |
You also need to consider the power source. Choose a gearmotor that matches your available voltage and current. INEED Motors can customize gearmotors to fit your power and duty cycle needs, ensuring your application runs smoothly.
Calculate Required Torque and Speed
Selecting the right gearmotor starts with matching its specifications to your application needs. You must understand how to calculate output speed and torque to avoid costly mismatches. If you choose a gearmotor with the wrong values, your system may fail, overheat, or require expensive redesigns.
Determine Output Speed
You need to know the target operating speed for your application before choosing a gearmotor. The output speed is the speed at which the gearmotor’s shaft rotates. This value depends on your process requirements, such as how fast you want a conveyor belt to move or how quickly a robotic arm should operate.
To find the output speed, use this formula:
Where:
Output Speed (RPM) is the speed you want at the gearmotor’s output shaft.
Input Speed (RPM) is the speed of the motor before the gearbox.
Gear Ratio is the ratio between the input and output speeds.
Tip: Always check the manufacturer’s datasheet for the motor’s input speed. This helps you set the correct gear ratio for your desired output speed and torque.
Calculate Required Torque
Torque measures the force that causes rotation. You must calculate the required torque to ensure your gearmotor can move the load without stalling or overheating. If you underestimate torque, your gearmotor may fail or run erratically.
Here are the most common formulas for calculating torque:
For lifting a mass: Torque (τ) = (mass [kg] × gravity [9.81 m/s²]) × radius [m]
Example: If you lift a 0.7 kg mass with a pulley of 4 cm diameter, the torque is 0.7 × 9.81 × 0.02 = 0.137 Nm.
You can also use this formula for motor torque:
Motor Torque (M [Nm]) = (Power [kW] × 9550) / Speed [RPM]
Note: The factor 9550 ensures accurate unit conversion. Ignoring it can cause errors of 10-15%.
When you select a gearmotor, remember that gear ratios increase torque but also introduce losses. Gear losses usually range from 5% to 15% per stage. You must account for these losses to get the actual output speed and torque.
Gear Ratio Selection
Choosing the right gear ratio is critical for gearmotor performance. The gear ratio affects output speed and torque, power transmission, and equipment lifespan. You must select a gear ratio based on your application’s load and speed requirements.
Aspect | Impact |
|---|---|
Power Transmission | A well-chosen gear ratio transfers power efficiently with minimal losses. |
RPM and Load Management | The correct gear ratio helps you manage RPMs and handle loads effectively. |
Wear and Tear | The wrong gear ratio increases wear, causing early failure and more maintenance. |
The gear ratio directly changes output speed and torque.
Always base your selection on your application’s needs and expected performance.
If you mismatch gearmotor specifications with your requirements, you risk system failure, overheating, and costly redesigns. For example, a gearmotor with insufficient torque will not move the load, while one with excessive speed may need extra gear reduction, adding complexity.
Tip: Test your gearmotor under real conditions to confirm that the output speed and torque meet your needs. Adjust the gear ratio if you notice overheating, noise, or erratic movement.
By carefully calculating required torque and output speed, and selecting the right gear ratio, you ensure your gearmotor delivers reliable performance. This step protects your investment and keeps your project running smoothly.
Choose a Gearmotor and Reducer Type

Select Proper Gearmotor
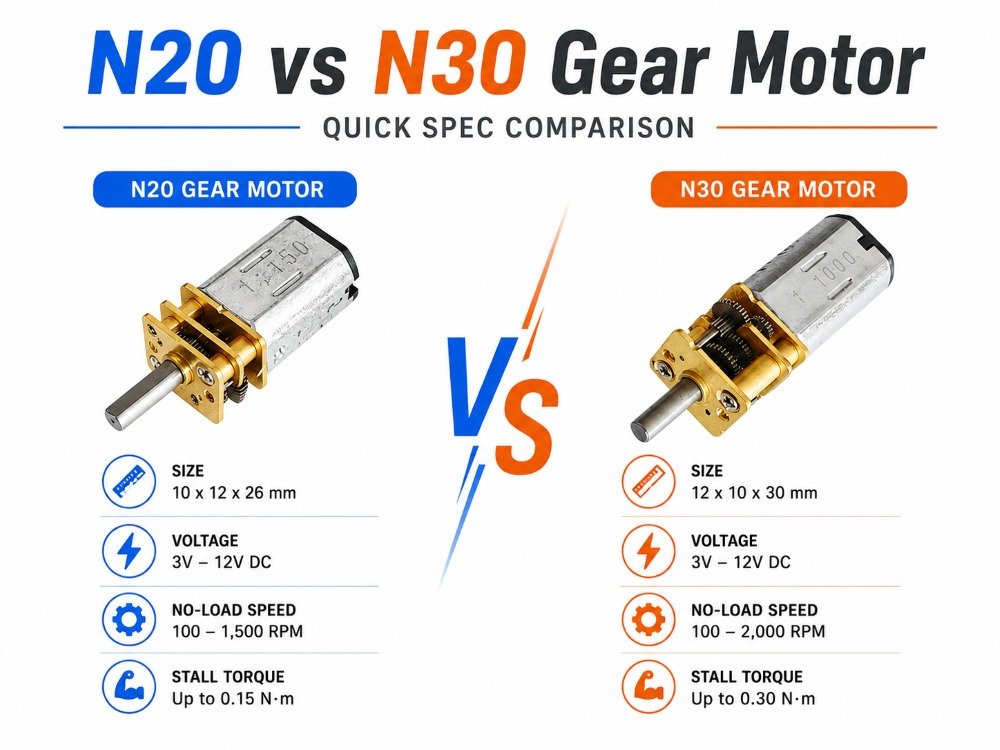
You need to choose a gearmotor that matches your application’s requirements for torque, speed, and space. INEED Motors offers a wide range of options, including N20 gearmotors, planetary gearmotors, worm gearmotors, and brushless DC gearmotors. Each type has unique strengths that suit different needs.
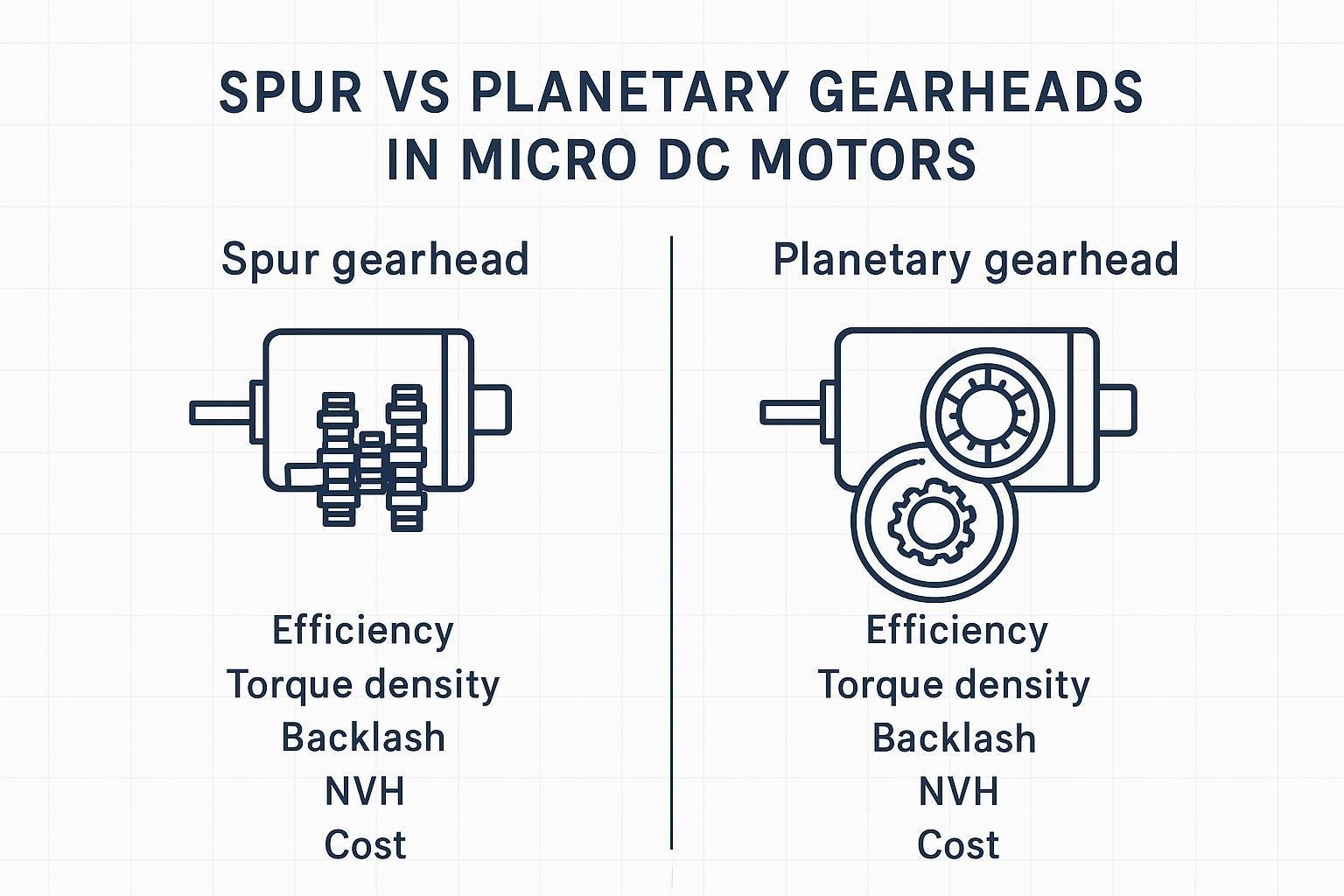
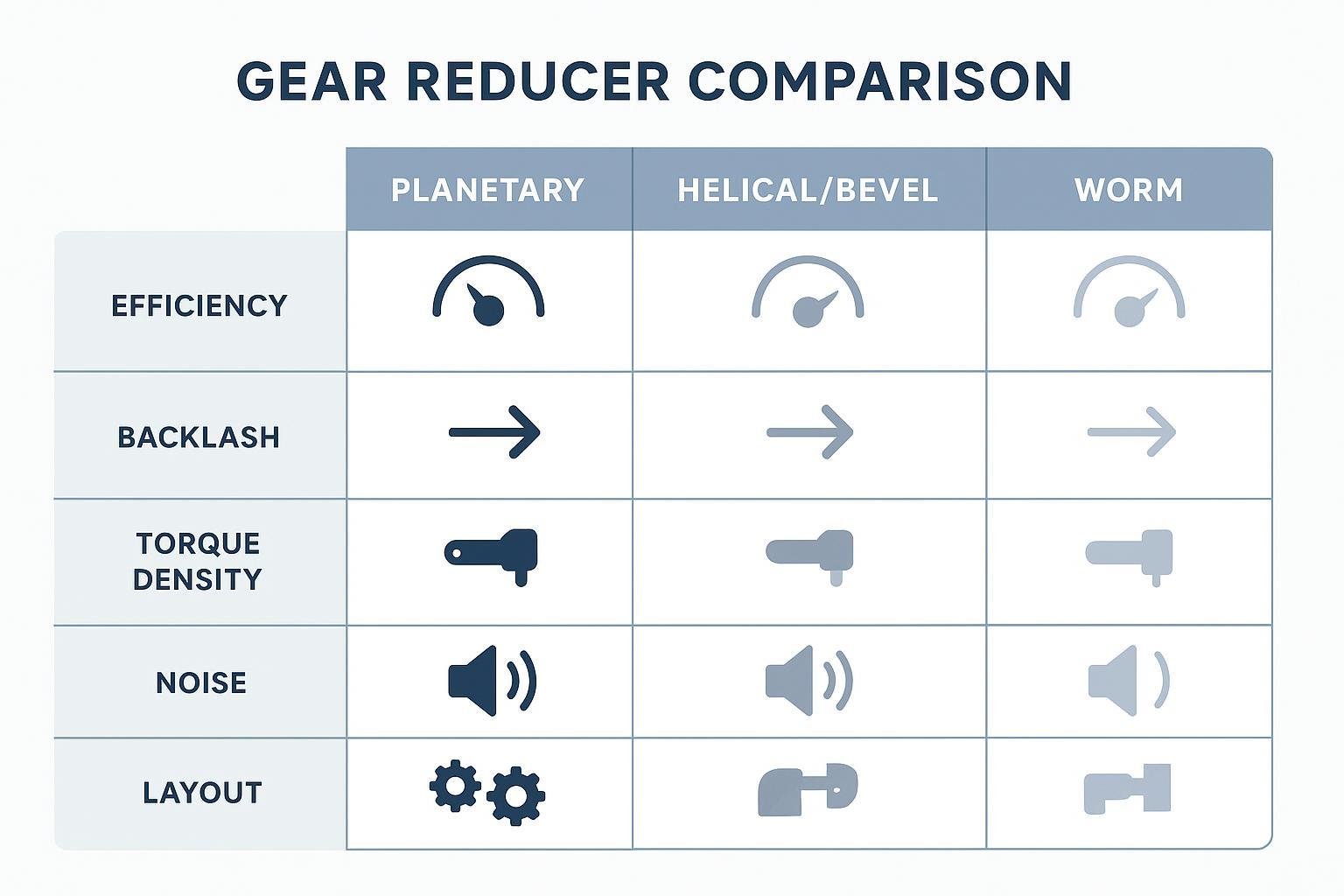
Planetary gearmotors deliver high efficiency and exceptional torque density. You can use them in robotics and automation where precise speed control and compact design matter. Worm gearmotors provide high torque output in a compact, right-angle configuration. These work well in applications with limited space and where you need reliable motion control. Brushless DC gearmotors offer quiet operation and long service life. You often see these in medical devices and smart appliances.
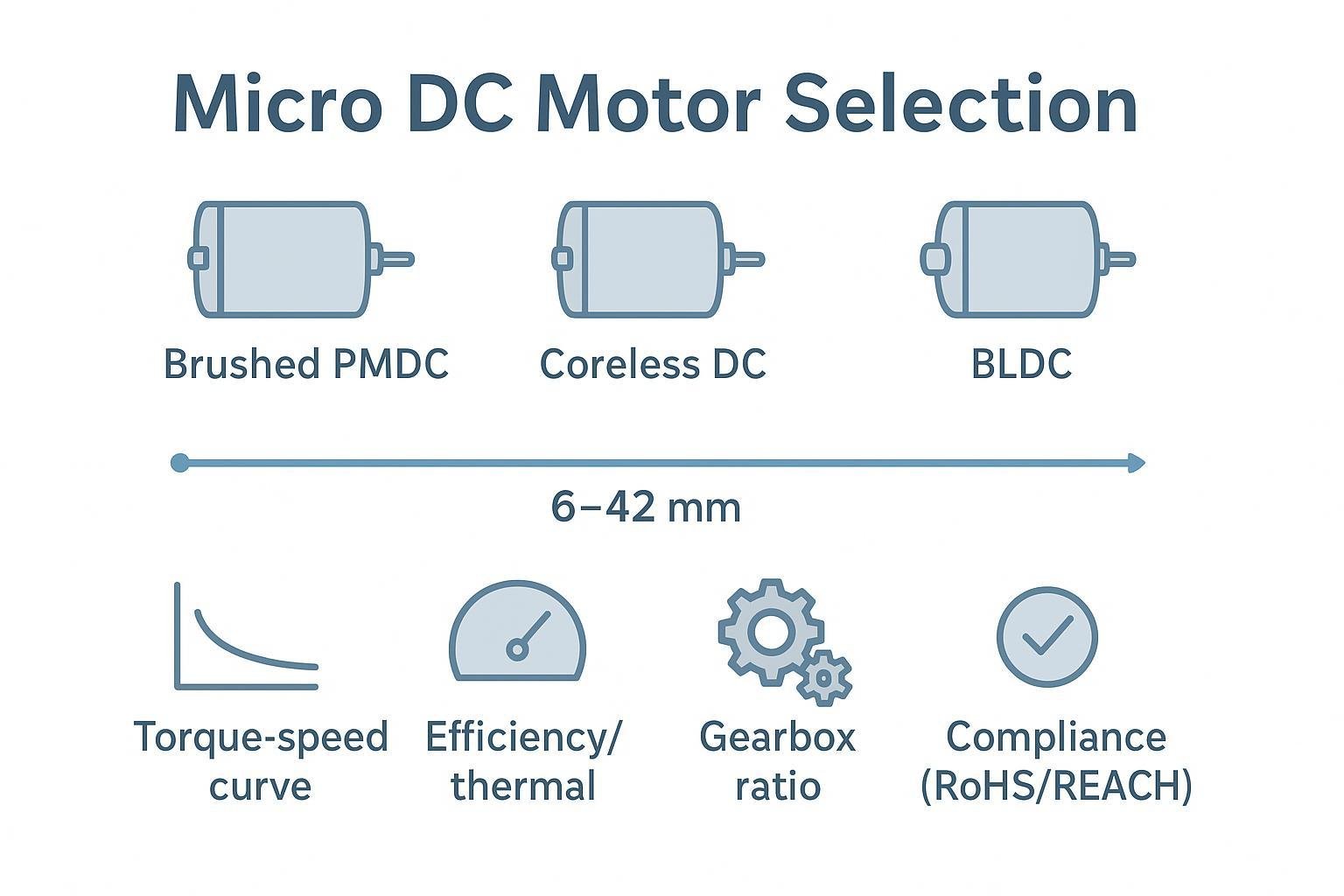
The type of motor, such as AC or DC, also affects performance. Many automation systems use three-phase asynchronous motors or permanent magnet synchronous servo motors. These motors give you reliable operation and flexible speed control.
Here is a quick comparison of popular gearmotor types:
Gearmotor Type | Key Characteristics | Technical Specifications |
|---|---|---|
Planetary Gearmotors | High efficiency, exceptional torque density, low backlash, compact design | Gear ratios: 3:1 to 1000:1, Torque: Up to 25,000 Nm, Speed: Up to 6,000 RPM |
Worm Gearmotors | High reduction ratios, compact, right-angle configuration | Efficiency improvements in modern designs |
Brushless DC Gearmotors | Quiet operation, long service life, precise speed control | Suitable for delicate and continuous-duty applications |
N20 Gearmotors | Miniature size, easy integration, reliable performance | Ideal for small robotics and consumer electronics |
Tip: You should always choose a gearmotor based on your torque and speed requirements. Consider the space available and the environment where you will use the motor and reducer.
Match Motor and Reducer
You must match the motor and reducer to achieve optimal performance. Start by determining your output torque, speed range, and accuracy requirements. Calculate the load parameters, including the torque and speed needed for your working load. Select the proper gearmotor based on these requirements. Then, choose a gear reducer that provides the right reduction ratio for your desired output speed and torque.
Follow these steps to ensure a good match:
Identify your performance requirements, such as torque, speed, and accuracy.
Calculate the load parameters for your application.
Select a servo motor or DC motor that meets your requirements.
Choose a gear reducer with a reduction ratio that matches your output speed and torque needs.
Make sure the motor and reducer type fits your application.
You can use parallel shaft gearboxes, angular gearboxes, or planetary gearboxes depending on your requirements. INEED Motors’ engineering team can help you select the best combination for your project.
Review Compatibility
You need to review compatibility between your selected motor and reducer before finalizing your selection. Torque mismatches can occur if the ratings do not align. Wiring differences may cause issues, especially if the pinouts or feedback systems differ. Feedback handling becomes important if your drive cannot support the feedback requirements of the servo motor, especially at high speeds.
Here is a checklist to help you review compatibility:
Check input and output parameters for both motor and reducer.
Calculate the gear ratio using the formula: Gear Ratio = Input Speed / Output Speed.
Make sure the output torque of the reducer meets or exceeds your load torque requirements.
Select the right type of gear reducer based on speed, torque, space, and maintenance needs.
Consider efficiency and service factor for longer service life.
Review mounting and coupling options for your machinery.
Consult manufacturer data and standards to confirm specifications.
Analyze life cycle costs, including installation and maintenance.
Test a sample under simulated operating conditions to verify your selection.
Note: You should always consult with experts or manufacturers like INEED Motors to ensure your motor and reducer combination meets all requirements for your application.
By following these steps, you can choose a gearmotor and reducer that deliver reliable torque, meet your requirements, and ensure smooth operation. You will avoid common compatibility issues and maximize the performance of your servo motor and gear reducer.
Validate Gearmotor Selection
Prototype Testing
You need to validate your gearmotor choice through prototype testing. Real-world testing helps you compare theoretical calculations with actual performance. Start by defining clear performance benchmarks. These benchmarks guide your testing and help you measure if the gearmotor meets your requirements. Monitor efficiency and durability under stress. Create a step-by-step test schedule with goals for each stage. Be ready to iterate on your design if you find issues. Common problems discovered during testing include lubrication problems, speed ratio issues, unexpected torque readings, noise, vibration, and temperature management.
Issue Type | Description |
|---|---|
Lubrication Problems | Incorrect lubricant can lead to operational issues; check lubricant levels regularly. |
Speed Ratio Issues | Measured speed ratios should match specified ratios; discrepancies indicate potential gear issues. |
Torque Measurement | Unexpected torque readings may suggest slipping or excessive friction in the reducer. |
Noise and Vibration | Abnormal sounds or vibrations can indicate worn gears or misalignment. |
Temperature Management | Excessive heat can damage components; monitor temperatures to ensure they are within limits. |
Performance Monitoring
During testing, you must monitor key performance metrics to ensure the gearmotor suits your application. Track torque, RPM, load capacity, and duty cycle. These metrics help you confirm that the gearmotor delivers the required torque and meets your operational requirements. You should also check braking torque, especially if your application needs precise stopping power.
Metric | Description |
|---|---|
Torque | The rotational force the motor can deliver, critical for moving or holding a load. |
RPM | The speed of the gearmotor’s output shaft, essential for determining operational speed requirements. |
Load Capacity | The maximum weight or force the gearmotor can handle without damage, crucial for reliability. |
Duty Cycle | The operational pattern of the gearmotor, important for managing heat and ensuring longevity. |
Tip: Always compare your test results with your initial requirements. If you notice any deviation in torque or speed, adjust your gearmotor or gear reducer selection.
Expert Consultation
You should consult with experts to improve your gearmotor selection process. Expert advice helps you address specific requirements and ensures compatibility with your machinery. Experts can solve unique challenges that may arise. They can answer questions such as:
What type of gear reducer suits your application best?
How do environmental factors affect gear reducer performance?
What maintenance requirements should you anticipate?
How does the load type influence gear reducer selection?
Expert consultation helps you optimize torque output and ensures your gearmotor meets all requirements for your project.
You can select the right motor and reducer by following these steps:
Determine torque and speed requirements.
Analyze your environment and installation space.
Assess movement frequency and efficiency.
Choose the right control method.
Accurate torque and speed calculations help you avoid overloading and ensure optimal performance. When you consult with INEED Motors, you gain these benefits:
Benefit | Description |
|---|---|
Cost Savings | Smaller motors and drives lower system costs. |
Torque Multiplication | Gearheads boost output torque for demanding tasks. |
Speed Reduction | Gearheads slow output speed, improving control and efficiency. |
Inertia Matching | Better inertia matching increases system efficiency and reliability. |
Explore INEED Motors’ Small Gear Motors to power your next innovative project.
FAQ
What factors should you consider when choosing a small gear motor?
You should check torque, speed, size, and environment. Match the motor to your load and duty cycle. INEED Motors offers custom options for unique needs.
How do you calculate the gear ratio for your application?
Use this formula:Gear Ratio = Input Speed (RPM) / Output Speed (RPM)
This helps you set the right speed and torque for your project.
Can INEED Motors customize gear motors for special requirements?
Yes! You can request custom dimensions, gear ratios, and technical features. INEED Motors’ engineers work with you to meet your exact needs.
What is the difference between planetary and worm gear motors?
Gear Motor Type | Key Benefit | Common Use |
|---|---|---|
Planetary | High efficiency | Robotics, automation |
Worm | High torque, compact | Medical, smart devices |
Tip: Choose based on your space and torque needs.