Introduction
If you’re speccing a micro DC gearmotor for a compact mechanism, you’re usually not choosing a motor first. You’re choosing a drive behavior that has to survive real tolerances, real duty cycles, and real assembly variation.
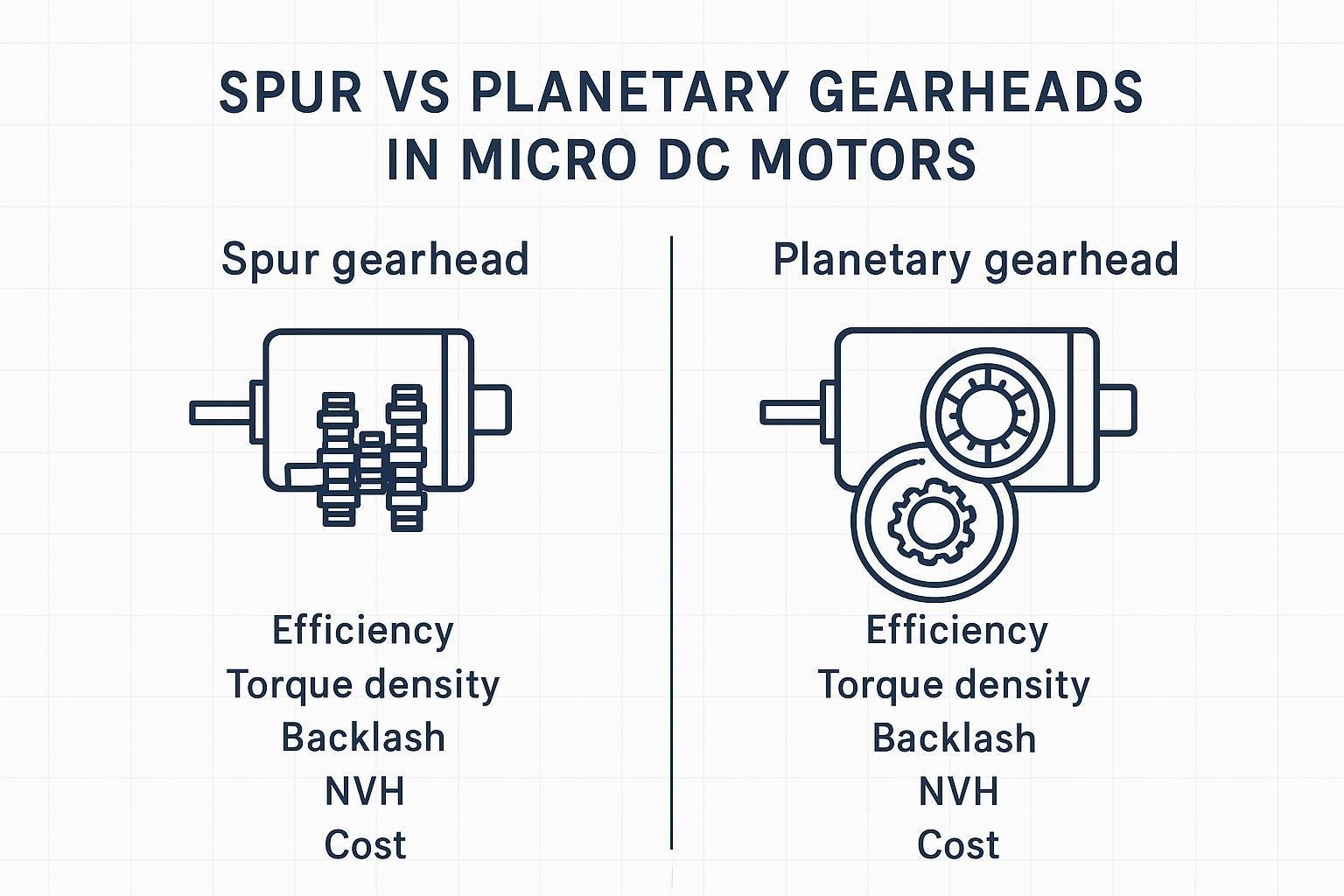
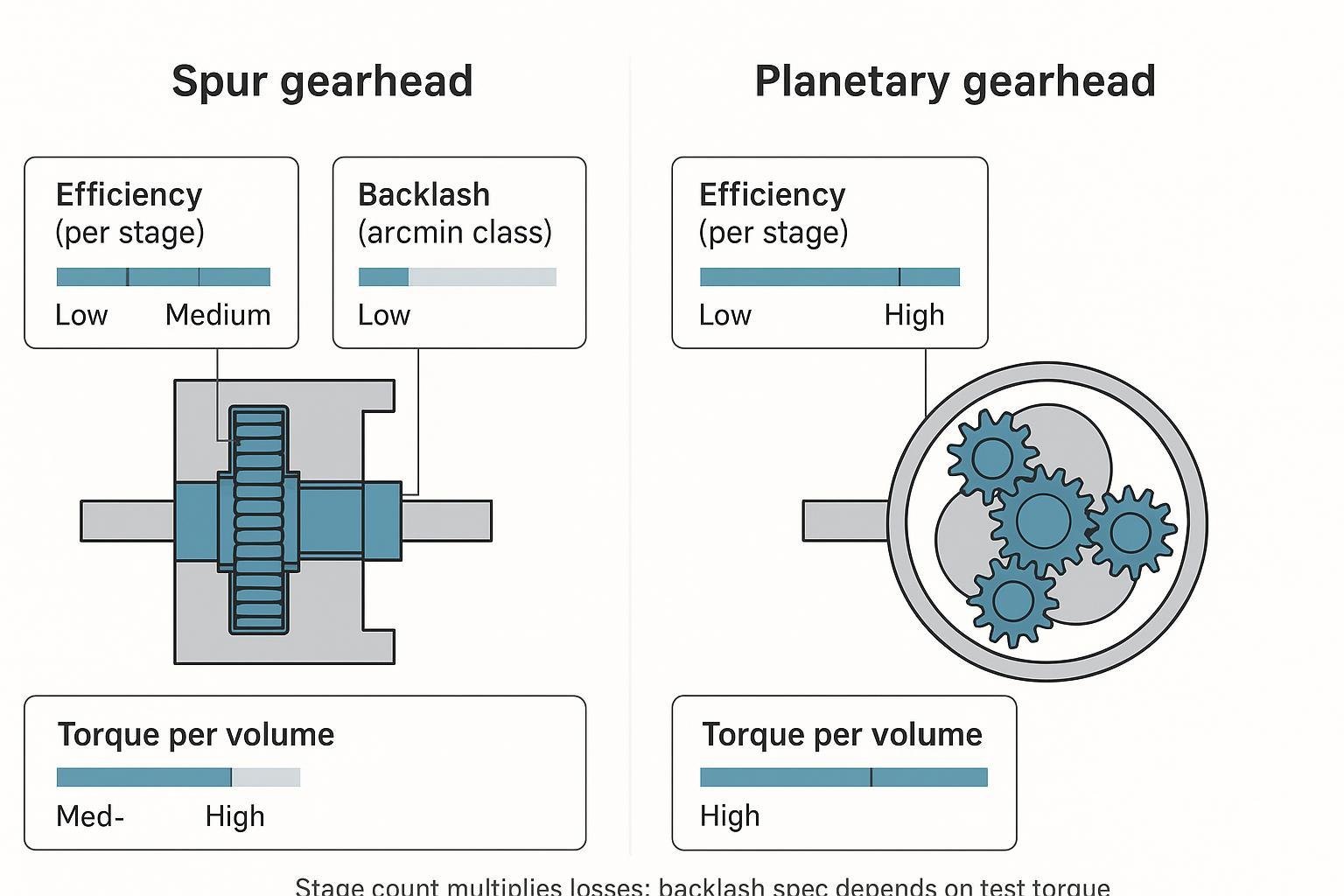
This is where the common comparison shows up: spur gear vs planetary gear. Both can hit the same output speed and torque on paper, but they get there with different loss mechanisms, different stiffness/backlash behavior, and different packaging constraints.
For decision-stage selection, the main trade-offs to balance are:
Efficiency (per stage and at your actual load point)
Torque density (torque per volume and how coaxial your package must be)
Backlash and lost motion (positioning error at reversals)
NVH (noise and vibration, especially at high rpm)
Durability (shock loads, wear, lubrication) and thermal limits
Cost and manufacturability
Core performance trade-offs
In the sections below, I’ll keep the comparison concrete so you can decide between spur gear vs planetary gear based on the constraints you actually have.
Efficiency per stage and total losses
At micro sizes, efficiency is not a single number you can safely copy from a brochure. It depends on load. It also depends on how many stages you need.
Two practical points tend to get missed:
Underloading kills efficiency. maxon’s write-up on gearhead efficiency dropping sharply at low load is worth translating into a spec habit: don’t oversize the gearhead “for safety” without checking the efficiency penalty at your working torque.
Stage count multiplies losses. Even if a gear stage is “high efficiency,” two or three stages compound. In a battery-powered device, that can be the difference between “meets runtime” and “fails runtime” with no other changes.
In general terms, well-built planetary stages are often cited as having high per-stage efficiency in compact drives, while spur trains can be competitive when ratios are modest and the geometry is simple. The engineering move is to compare apples-to-apples: same ratio, same load point, same lubrication, same operating speed.
Pro Tip: When a datasheet only gives a single “efficiency” value, ask what load point it represents, and whether it includes bearing/seal losses. If it’s measured near rated torque, your part-load efficiency may be materially worse.
Torque density and package constraints
If your envelope forces a coaxial drive (motor in line with the output shaft), planetary gearheads have a structural advantage. Load is shared across multiple planet gears in a compact concentric layout, which often supports higher torque per volume.
Spur gearheads (in the common parallel-shaft arrangement) can be efficient and inexpensive, but the package can grow in diameter or require a layout compromise if you need both high ratio and high torque in a tight axial stack.
A useful way to state it in requirements language:
Choose planetary when the mechanism is torque-limited and package-limited.
Choose spur when you’re cost-limited, ratio is moderate, and the envelope tolerates the geometry.
Backlash ranges and positioning accuracy
Backlash is one of the most overloaded terms in small drives. Two reminders help you read specs correctly:
Backlash (tooth clearance) is not the same as lost motion (system deadband under reversal). Design News explains why backlash and lost motion are not the same spec, and Oriental Motor adds practical context on backlash vs lost motion.
Backlash specs are measured under a defined test torque. If the test torque is higher, elastic wind-up and compliance can inflate the measured value.
Many precision gearbox vendors publish backlash “grades” in arcminutes under low test torque. For example, Apex Dynamics describes backlash grades (economy, high precision, premium) and notes they’re measured at about 2% of rated output torque for a single-stage transmission (and that multi-stage configurations can increase backlash).
For micro DC gearmotors, the exact arcmin number depends on diameter, materials, and build quality. What matters for selection is the error budget:
If your mechanism only needs “move A to B,” backlash is usually acceptable if it doesn’t create rattle or audible click at reversal.
If you need repeatable positioning (camera modules, lab dosing, small robotics joints), backlash class and torsional stiffness matter, and you should validate lost motion at your working torque, not just a no-load reversal test.
NVH, durability, and limits
Noise/vibration behavior in small gearheads
Don’t reduce NVH to “spur is noisy, planetary is quiet.” The dominant drivers are gear mesh excitation and what the housing does with it.
Motion Control Tips explains that gear noise is generated by tooth-to-tooth load transfer, shows how it ties to mesh frequency and harmonics, and highlights housing resonance as a major amplifier in compact gearmotors: how to design quiet gearmotors.
In practice, spur gearheads can exhibit more tonal “whine” at high speed if tooth finish, contact ratio, or housing stiffness aren’t controlled. Planetary gearheads can also be noisy if planet load sharing is imbalanced or the carrier/housing is compliant.
What to do with that as a spec owner:
Define the test condition for noise (distance, load, speed, mounting).
Ask for the dominant noise frequency band if your device has acoustic constraints.
Treat “low noise” claims as meaningless without the test setup.
Shock loads, lifetime, and materials/lubrication
Shock loads and reversals are where small gearheads die.
The failure modes differ by design, but the checks are the same:
Peak torque at stall and at impact (including reflected inertia)
Tooth root strength and surface durability (material, heat treat, surface finish)
Bearing support and shaft alignment under load
Lubricant choice and retention (especially with high-speed input)
If your application includes impacts (door latch hits, end-stop collisions, drop events), design around them explicitly. A gearhead that survives continuous torque can still fail early from repeated shock.
Thermal implications and duty-cycle planning
A gearmotor’s thermal limit is often reached through a chain: electrical losses in the motor increase temperature, grease viscosity changes, friction changes, and efficiency shifts. Then the mechanism drifts.
If the duty cycle is pulsed (common in locks, valves, lab devices), the correct question is not “what’s the rated torque?” but “what torque can I run at for my on-time/off-time profile without cooking the motor or degrading the lubricant?”
Selection rules and ratios (spur gear vs planetary gear)
Ratio-per-stage, stage counts, input speed limits
Use these rules as a starting filter, not as a substitute for datasheets:
Higher overall ratios usually mean more stages. More stages increase loss, increase compliance, and increase the number of parts that can create noise.
Input speed limits are often set by bearing pitch-line speed, lubrication regime, and heat. If you need very high input rpm, ask whether the gearhead is rated for that speed continuously and what lubricant is used.
If you’re close to the gearhead’s limits, focus on test conditions: temperature rise, noise at speed, and wear after endurance cycling.
Quick decision rules tied to constraints
If you need a fast decision, start from your hard constraints:
Your envelope is tight and coaxial, and torque density is the bottleneck → planetary is usually the safer first pick.
Your mechanism is simple, cost-sensitive, and doesn’t need tight reversal accuracy → spur is often adequate and easier to source.
Your positioning error budget is tight → focus on backlash class and validate lost motion at working torque. Don’t accept a backlash spec without the test condition.
Your acoustic budget is tight → treat NVH as a system requirement. Gear design, housing stiffness, and assembly tolerances matter as much as gear type.
Your duty cycle is aggressive → check thermal rise and efficiency at the actual load point; avoid oversizing that forces the gearhead into low-load inefficiency.
If you need engineer-to-engineer help translating a mechanism’s load case into a gearbox spec, this is where a supplier’s application support matters more than their catalog depth. Teams working with INEED Motors often start from the mechanism constraints and iterate on ratio, stage count, shaft geometry, and integration details (encoder, connector, mounting) to reduce prototype loops; their planetary overview is a useful reference point: INEED Motors.
Application mapping
Medical and lab devices
Medical and lab devices tend to reward consistency over peak performance.
Planetary gearheads often fit when you need compactness plus stable torque in a small envelope (pumps, analyzers, dosing systems).
Spur gearheads can still be the right answer for low duty, low noise actuation where positioning is not tight and cost matters.
The common mistake is skipping validation at reversal. If your mechanism frequently reverses (syringe pumps, valve control), measure lost motion at the working torque and temperature.
Robotics and industrial automation
Small robotics joints and compact actuators are typically stiffness- and backlash-sensitive.
Planetary gearheads are frequently chosen for torque density and concentric packaging.
Spur gearheads can work in simple linear actuators or mechanisms where compliance is tolerated, or where the system can close the loop with an encoder and tolerate the deadband.
If the application uses closed-loop control, quantify what the controller can correct (steady-state error) versus what it can’t (mechanical deadband at reversal).
Security and consumer mechanisms
Locks and consumer mechanisms are where spur gearheads show up repeatedly: moderate loads, simple motion, high cost sensitivity, and strong NVH expectations.
A concrete example is INEED’s Spur Gear Motor for Smart Lock case page. Regardless of supplier, your reliability focus should be the same: shock at end stops, tolerance stack-ups, and lubrication stability over life.
For a broader overview of motor options (brushed, brushless, coreless) that often pair with these gearheads, INEED’s Micro DC Motors page is a practical internal reference.
Conclusion
For micro DC gearmotors, the spur vs planetary choice is usually straightforward once you state the constraints in engineering terms.
Choose planetary when torque density and coaxial packaging are hard constraints, or when you need better stiffness and a clearer path to low-backlash configurations.
Choose spur when the mechanism is simple, cost-sensitive, and tolerant of reversal deadband, especially at modest ratios.
Before you lock the spec, read the datasheets like test reports: look for measurement conditions (load point, test torque for backlash, noise setup), and prototype the drive in the real mechanism. That’s where assumptions about efficiency, backlash, and NVH get validated or corrected.
FAQ
1) Is a planetary gearhead always more efficient than a spur gearhead?
Not always. At micro sizes, efficiency depends heavily on load point, input speed, lubrication, and stage count. A planetary stage can be very efficient, but if your required ratio forces multiple stages—or if you run far below the gearbox’s intended torque—total efficiency can drop quickly. The practical way to compare is to check efficiency at your actual working torque and speed for the same overall ratio.
2) Which gear type gives lower backlash for small positioning mechanisms?
There isn’t a universal winner. Backlash is influenced by tooth geometry, tolerances, materials, and how the gearbox is assembled, not just the gear type. For positioning mechanisms, treat the published backlash number as a starting point, then validate lost motion under your working torque (especially if you reverse direction often). If you’re closing the loop with an encoder, also consider torsional stiffness and deadband at reversal.
3) How do I decide quickly between spur vs planetary for a micro DC gearmotor?
Use your hard constraints:
If you need high torque density in a coaxial package, start with a planetary gearmotor.
If the application is cost-sensitive, the ratio is moderate, and reversal accuracy isn’t tight, a spur gearmotor is often sufficient.
If you’re near limits (noise, temperature, or shock loads), ask for test conditions and prototype in the real mechanism—those factors usually decide the “right” gearbox faster than the label “spur” or “planetary”.